コース紹介
総合実習受講生アンケート結果(2015年度)
・小型EV車自動運転制御総合実習
・自動運転支援センシング技術総合実習
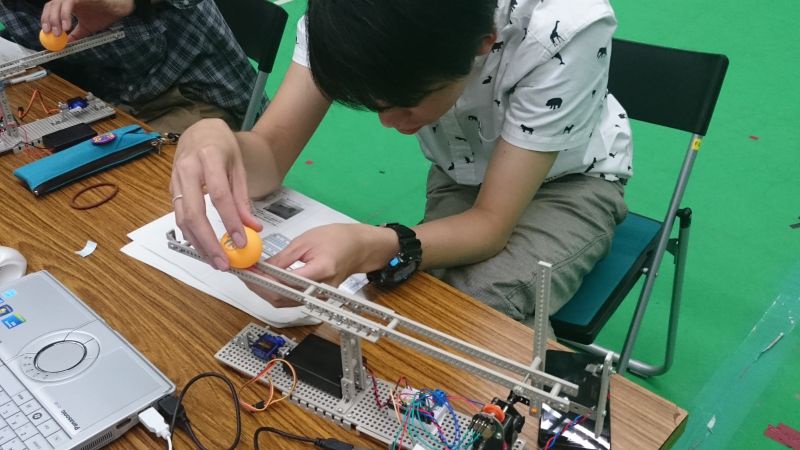
・機械設計加工・モデルカー製作総合実習
・移動ロボット制御総合実習
・@ホームサービスロボット製作総合実習
・学部・高専インターンシップ
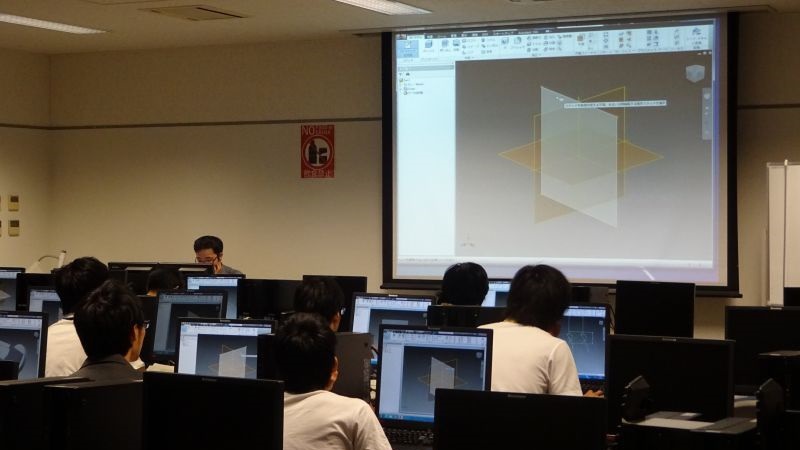
「ロボット工学概論」アンケート結果(2015年度)
・全体の進め方について 感想・意見
・講義ごと 感想・意見
総合実習ルーブリック集計結果(2015年度)
・ルーブリック集計結果(pdfファイル)
総合実習受講生アンケート結果(2015年度)
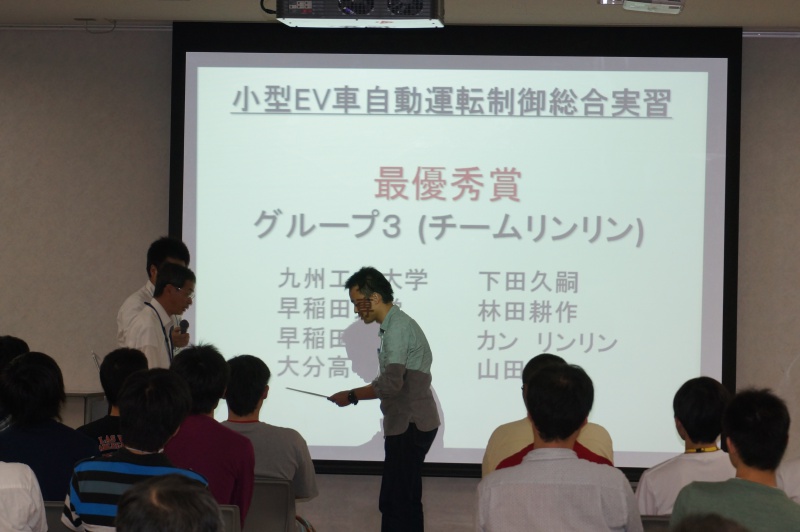
小型EV車自動運転制御総合実習
実習に参加した感想
- 実際にCOMS(小型EV車)を制御する体験ができ良い経験になった。また、実機を制御する場合とシミュレーションの違いも体験できた。(カーロボ履修生:8件)
- 所属・専攻・年齢の異なるメンバーでグループワークをすることで、自分にない知識を共有でき、それぞれの学校生活や研究の話がきけ、とても楽しい実習だった。また、自分の専攻分野についてはそれぞれがリーダーシップを発揮し、専門外のことに対しても意見を出し合いながら取り組み、協力して問題を解決していくことができた。(カーロボ履修生:7件,インターンシップ生)
- 多くのことが学べ、毎日が充実していて、とても面白い実習だった。(カーロボ履修生:5件,インターンシップ生:2件)
- うまくいかなかった部分は多かったが達成感があった。(カーロボ履修生:2件)
- 初めてチームで1つのシステムを開発する体験ができた。(カーロボ履修生)
- 座学が少なく、ほとんどが実機の調整・制御を行う実戦形式だったため集中して取り組むことができた。(カーロボ履修生)
- Simulink、MATLABを良く勉強でき理解できた。(カーロボ履修生)
- メンバーそれぞれが問題に対して様々なアプローチをするので楽しかった。(カーロボ履修生)
- 制御に関する知識がなく大変だったが、とても楽しく、もっと自動運転制御を学びたいと思った。(カーロボ履修生)
- 自分でプログラムなどを作成することで、普通の講義より力が付いたように思う。(カーロボ履修生)
- 実習時間外でも先生やTAの方々が対応してくれたのが良かった。(カーロボ履修生)
- 知らない人たちと行うことで、グループワークを効率的に解決する方法を学べた。(インターンシップ生)
- 進学を考えている高専生と話し合えて良かった。(インターンシップ生)
- 自分だけ高専本科生だったが、大学院生、他校の専攻科の方々が優しく教えてくれた。(インターンシップ生)
- 自分にはレベルが高かったが研究の雰囲気を掴むことができ、卒業研究などに活かしていきたい。(インターンシップ生)
- 大学院での生活や制御に関する知識まで、いろいろなことを教えてもらえとても有意義だった。(インターンシップ生)
- 他高専生と様々なことについて意見交換ができて良かった。(インターンシップ生)
- たくさんの人たちと触れ合うことができ、自分の将来を創造することができるようになった。
- (インターンシップ生)
気づいた点、改善した方が良いと思う点
- 実習期間に対して演習内容が難しいと感じた。もう少し長期でやりたかった。(カーロボ履修生:2件,インターンシップ生:2件)
- 参加者それぞれの専攻や研究などの話をもっと聞きたかった。(カーロボ履修生)
- 搭載しているセンサーが貧弱だったのでプログラムが困難だった。(カーロボ履修生)
- 搭載しているセンサーの特徴・特性について詳しい説明があれば、基本的な制御技術取得に時間をかけず、応用した課題へもっと早く取り掛かれたと思う。(カーロボ履修生)
- チーム決めに個人の得意・不得意を考慮してバランスを取ってほしかった。(カーロボ履修生)
- 時間をかけて満足できる結果にならなかったのが心残りだった。(カーロボ履修生)
- ソフトウェアの使い方をもう少し講義で話してほしかった。(インターンシップ生)
自動運転支援センシング技術総合実習
実習に参加した感想
- ハードだったが充実した2週間だった。(カーロボ履修生:6件)
- 参加者が自分にはない知識・技術を持っていてとても勉強なった。また、協力して実習ができた。(カーロボ履修生:6件)
- 参加者の能力の高さに驚いた。今後の研究に対する姿勢に良い刺激になった。(カーロボ履修生:5件、インターンシップ生)
- 資料の中にしか出てこない、貴重で最新のセンサーを実際に使うことができ、貴重な経験となった。(カーロボ履修生:3件)
- 実際のセンサーを使ったことで、原理や機能、特徴をよく理解でき、制御・解析プログラミングも楽しくできた。(カーロボ履修生:3件)
- グループのメンバーから、異なる様々な解決案がでて、それらを試すことで様々な手法の性能や演習の内容をより理解することができた。(カーロボ履修生:3件)
- 情報処理は専門外であり、たくさんの知識を勉強できた。今後の研究や仕事にとても役に立つ経験ができた。(カーロボ履修生:2件、インターンシップ生)
- どのセンサーを使うか、誰が担当するか、どのように解決するかなどみんなで話し合い進めていった。最後の資料作成なども通していろいろな方面の能力を上げることができた。(カーロボ履修生:2件)
- 課題解決のための方法や、それを実現するためのプログラミングなど、研究に近い実習でとても有意義だった。(カーロボ履修生:2件)
- 積極的に行動し、自発的に問題に取り組めるようになった。(カーロボ履修生)
- 新しいことを学ぶ楽しさや、チームで話し合い一つの物を作り上げていく面白さを知ることができた。(カーロボ履修生)
- 時間外の作業がほとんどなく、とても良かった。(カーロボ履修生)
- 専門が異なる学生と作業することで、自身の専門に関しては思っていたよりも実力がついていることを実感できた。(カーロボ履修生)
- 同世代の人たちが、今どのようなことをしているのかを知ることができた。(カーロボ履修生)
- 自分だけが高専本科生だったが、先輩たちが自分のわからない所を教えてくれとても有り難かった。(インターンシップ生)
- 様々な人と共に実習に取り組むことで、自分の専門に対する得手、不得手が明確になった。(インターンシップ生)
- 普段と異なる環境で実習や生活を送ることで、貴重な経験を積むことができた。(インターンシップ生)
- 自分の技術・知識の不足さが身に染みてわかった。(インターンシップ生)
気づいた点、改善した方が良いと思う点
- 他分野の人や情報処理初心者には内容が難しかった。最初の授業の際にもっと説明や教科書や論文などの資料があると良かった。(カーロボ履修生:5件)
- 情報処理初心者には、最初からシステムを作るのは難しく、時間も足りなかった。もう少しサポート体制を整えて欲しかった。(カーロボ履修生:2件)
- 先生とディスカッションできる時間が少なかった。(カーロボ履修生)
- 課題が難しく、できる人が全部一人でやる、自分が出来なことに気づきあきらめてしまう人がいるなど、うまくグループとして作業できなかった。(カーロボ履修生)
- 受講生は全てのコンテストを見学するはずなのに、ある実習の受講生がほとんど見学に来ていなかった。(カーロボ履修生)
- すべてのコンテストを見に行っているのに、表彰式でまたコンテストの概要を説明する必要はないと思った。(カーロボ履修生)
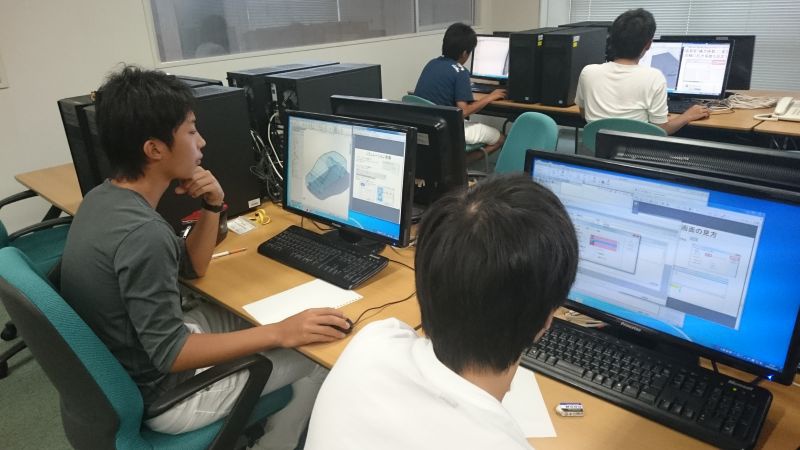
機械設計加工・モデルカー製作総合実習
実習に参加した感想
- 設計ソフトを用いた解析は初体験でとても興味深かく、設計・解析スキルも身につけることができた。(カーロボ履修生:5件)
- 新鮮な体験であり、意見交換によって他校生の考え方も知ることができ、良い刺激になった。(カーロボ履修生:4件、インターンシップ生)
- 2週間の短い期間だったが充実した内容でとても満足している。(カーロボ履修生:3件)
- チームが少人数だったため、必然的に協力し合え、じぶんの仕事に対しても真剣さが増した。(カーロボ履修生:3件)
- この実習はいかにも「カーロボティクス」といった内容であり、来年度以降もこのようないい実習を後輩たちに受けてもらいたいと感じた。(カーロボ履修生)
- 今後の研究や就活に活かせそうなことが多く、参加して良かった。(カーロボ履修生)
- ミニ四駆ではあるが、車の設計ができて面白かった。(カーロボ履修生)
- 内容は少し難しかったが、今後にも役立つことを学べて良かった。(インターンシップ生)
- 大学、大学院の雰囲気なども知ることができて良かった。(インターンシップ生)
- 自分の進路を決めかねていたが、いろいろな話を聞くことでとても参考になった。(インターンシップ生)
気づいた点、改善した方が良いと思う点
- 第1希望が定員オーバーだったため、今回の実習に配属されたが、志望動機を書いてそれを参考に選ぶなど、納得のいく配属選考をして欲しかった。(カーロボ履修生:2件)
- 提出するレポートや課題などが不明瞭だったので、実習担当の先生が決めるのではなく、学校側で明確な合格基準を作ってほしいと感じた。(カーロボ履修生)
- コンテストのスケジュールが、事前に知らされていたものと実際とで大きく異なっており、戸惑うことや、まごつくことがあった。事前にもっとスケジュールを良く練って生徒に知らせてほしかった。(カーロボ履修生)
移動ロボット制御総合実習
実習に参加した感想
- 制御の基礎やシミュレーションだけでなく、実機を使った運動制御や画像認識も学べてとても良かった。(カーロボ履修生:6件、インターンシップ生)
- 他大学院生・高専生・学部生と一緒に受講する演習は普通の授業では体験できないものであり、お互いを高めあうことができ刺激的なものだった。(カーロボ履修生:3件、インターンシップ生:2件)
- 高専・学部インターンシップ生はみんなやる気があり、情熱を持って取り組んでいた。特にインターンシップ生達はとてもまじめで感心した。(カーロボ履修生:3件)
- 各学校で勉強していることや研究内容に関して話すことができて良かった。(カーロボ履修生、インターンシップ生:3件)
- TAが親切に対応してくれたのが良かった。(カーロボ履修生:2件、インターンシップ生)
- 同じ課題に対しても様々なアプローチがあることを知った。(カーロボ履修生、インターンシップ生:2件)
- ほとんど勉強したことのない分野だったため、内容を理解することが困難であったが、良い経験になった。(カーロボ履修生:2件)
- 楽しんで実習ができた。(カーロボ履修生:2件)
- コンテストでロボットを動かすことができて良かった。(カーロボ履修生:2件)
- 自分の研究に必要な知識を改めて学べ、今後も役立つことを習得できた。(インターンシップ生)
気づいた点、改善した方が良いと思う点
- コンテスト課題発表後の作業時間が短かった。(カーロボ履修生:9件)
- ペースが速くてついていけない、おいていかれることがあった。(カーロボ履修生:6件)
- ロボットの台数が少なく、交代で実験をしなければならなかったため、無駄な待ち時間があった。(カーロボ履修生:5件)
- 作業環境の不備が何度かあり、集中して作業できないことがあった。(カーロボ履修生:4件)
- メンバーが制御や画像処理が得意でない人で固まり、苦労している班があったように思う。事前に受講生の得手・不得手を確認して班を決めた方が良いと思う(カーロボ履修生:2件)
- 最終課題の内容に対して、それまでの実習内容があまり繋がっておらず、制御やMATLAB初心者には少し難しく大変だったと思う。(カーロボ履修生、インターンシップ生)
- 実習日程や課題内容、締め切りなどの詳しい説明が欲しかった。(カーロボ履修生、インターンシップ生)
- もう少し期間を長くしてほしい。(カーロボ履修生)
- MATLABなどの初心者に対するフォローがもっとあると良かった。(インターンシップ生)
@ホームサービスロボット製作総合実習
実習に参加した感想
- 他大学、高専生とのグループワークは今後もあるかわからない経験だったため非常に新鮮であり、いつもとは違う視点を得られ、またスキルアップにもなった。(カーロボ履修生:5件,インターンシップ生:3件)
- Ubuntu、ROS、Python,FPGAなど、普段触れたことのないことに挑戦することができて良かった。また、少しずつ内容を理解でき、自分のアイデアを導入することもできた。(カーロボ履修生,インターンシップ生:2件)
- 事前に指針や課程が示されていたので、前半は非常にスムーズに課題をこなすことができた。(カーロボ履修生)
- @homeの様々な班のタスクを詳しく知れて良かった。(カーロボ履修生)
- 高専生の頭の回転の速さに驚かされ、とてもいい刺激を受けた。(カーロボ履修生)
- 初対面の人とチームワークやタスク振り分けをスムーズに実現することに対して、多くの課題を発見し、解決することはとても有意義だった。(カーロボ履修生,インターンシップ生)
- 一から始め、挑戦していくいい経験になった。(カーロボ履修生)
- 先生ともっとコンタクトを取り、事前知識を持つべきだったと思う。知識が不足していたなと後悔している。(カーロボ履修生)
- 実機を使い、実際に手を動かして学習することができとても理解が深まった。(インターンシップ生)
- ロボコンの話や、海外の方と初めて話すことができたのでうれしかった。(インターンシップ生)
- 自分の知らない様々な話が聞けてとても良かった。(インターンシップ生)
- 期間内に完成するか不安だったが、意外とうまくいって良かった。(インターンシップ生)
- 年上ばかりの実習現場に慣れるのに時間がかかったが、うまい接し方がわかってきた。(インターンシップ生)
- 統合作業は大変だったがチーム作業の実感ができて楽しかった。(インターンシップ生)
- 来年から通うのが楽しみなった。(インターンシップ生)
- たどたどしくても英語でディスカッションできたことで自身が付いた。(インターンシップ生)
- 海外インターンシップ生とグループを組んでおり、英語の必要性を感じた。(インターンシップ生)
気づいた点、改善した方が良いと思う点
- 担当によって難易度,作業量に大きな違いがあった。もっと均等にした方が良いともう。(カーロボ履修生:1件,インターンシップ生:2件)
- 実習生の健康のため、1日の作業時間に上限を設けると良いと思う。限られた時間の中でタスクを見積もる能力が付くと思う。(カーロボ履修生)
- もう少し時間が欲しかった。(カーロボ履修生)
- 統合作業はもっと早い段階からやっても良かったと思う。(インターンシップ生)
学部・高専インターンシップ生
ラボツアー・FAIS見学について
- どの研究室も丁寧で、自分の知らない研究についても概要を理解し易かった。大学院に興味がわき、進路を選択するうえで有意義だった。(5件)
- とても面白かった。(2件)
- FAIS見学で分解した車を見ることができ、とても良かった。自動車がどのように進化しているのが良くわかった。(2件)
- 連携大学院の特色や魅力を知るのに充分であった。
- 個別に研究室を訪問するきっかけを貰え、実際に見学もでき、ラボツアーが最初の方にあってよかった。
- 実習の後にやるのは少し大変だったが、実習をいったん切り上げ気晴らしになった。
- 1つの研修室にいられる時間が少なかった。もっと時間を増やす,1研究室の時間を短くするなどして多く回れた方がいいと思う。(3件)
- ラボツアーの参加・不参加を選べると良かった。(2件)
- 初日にまとめる、朝にやるなどしてほしい。実習後では疲労感があった。(2件)
- 実習が忙しかったのであまり時間を使いすぎない方がいいと思った。
- FAIS見学を実習開始前に行う必要性を感じない。
- パソコン画面だけで説明した研究室があったが見にくかった。
- 立ったまま長時間話を聞くのが大変だった。
インターンシップ中の生活(宿泊・食事)について
- 施設も整っており、暮らしやすく非常に快適だった。(5件)
- 自転車や調理器具の貸し出しなど、宿泊環境に足りないものを補ってくれてすごく助かった。(2件)
- 九工大の談話室を開放してもらっていたのがものすごく助かった。
- インターンシップ生で集まって自炊することが多かった。
- 宿舎の違いで設備が異なっていた。インターネット環境や冷蔵庫,電子レンジは全宿舎にあった方が良いと思う。(4件)
- 大学のWi-Fiを使えるようにして欲しい。
- 洗濯にかかる費用が少し気になった。
- 昼は学食があったが、夜は周りに食事ができるお店が少なかった。
- 実習が忙しく、自炊できない日も多かったので食事補助があると良いと思う。
- 事前に知らされていた設備と、実際の部屋の仕様が違っていたので困った。
- 自由に使える調味料があるとなお良かった。
- 自転車が使えるとなお良かった。
- 一人でのせいかいつはとても楽だったが、都会での暮らしは初めてでわからないことが多く、部屋にこもっていることが多かったため、実習外で人と関わる機会は少なかった。
「ロボット工学概論」アンケート結果(2015年度)
全体の進め方について 感想・意見
- ロボットについて,基礎知識から企業での現状まで,広く知識を得ることができた.(23件)
- いつもは関わることがない他大学の教授や,一線で情勢を見ている企業の方の講義を受講するとても貴重な体験ができ,とても良い講義だった.(12件)
- 機械のことから,回路や制御など,自身の専門に関係なく幅広く学ぶことができてよかった.(11件)
- 今のままでよいと思う.(5件)
- 毎回講義内容,講師が変わり,最後まで集中し,楽しんで受講することができた.(4件)
- 様々な専門知識,企業の現状などの話を聞け,進路を考えるうえでも参考になった. 自分が何に興味があり,何が得意なのかを知るきっかけにもなった.(4件)
- 画像や動画が多く,全体的にわかりやすく良い講義だった.(3件)
- 1回の講義が1時限(90分)のため,講義内容がまとまっており,集中して聞けた.(3件)
- 前半の講義でロボットの概要について学べたため,後半の専門的な話が理解しやすかった.(2件)
- シラバス通りに進んでくれていたので,予定がわかりやすかった.(2件)
- 講義資料を事前に見ることができたため予習ができ,専門外の講義にも対策ができた.(2件)
- 小テストや感想があるため,授業をしっかり聞くことができた.また興味が持てた分野に関しては自身で少し調べてみるなど,行動にも繋がった.
- 専門外の講義については,もっと理解できるように事前学習をしておけば良かったと感じている.
- 課題の形式を統一してほしい.(8件)※理由:混乱する.家に持ち帰ってやりたい.あまり話を聞いていない学生が多くみられたため,講義後の小テストに統一することで集中するようになると思う.他の講義のレポート作成と重なってしまうため,レポート課題だと負担が大きい.
- もう少し企業の方の講義が多いと良かった.(5件)
- 専門外の講義では,難しすぎて理解が追いつかない場合があった.もう少し基礎知識を説明する,予備資料を増やすなどして欲しかった.(5件)
- 自動車会社の自動車に関する講義があればうれしかった.(2件)
- ロボット工学概論とは別に,実際にロボットを製作する講義(実習)があると良いのではと思った.(2件)
- わからない人に挙手してもらうことを前提とするのではなく,わからない人がいることを前提として説明してほしい.(2件)
- 受講生が多すぎて,1教室に収まっていないのが気になった.せっかくの企業の方の講義を別室で聴講するのはもったいないと思う.(2件)
- 遠隔講義の音声が小さくて聞こえづらい時があった.(2件)
- 講義内容の濃さに対して,講義時間が短いと感じた.講義後に小テストがあるときは,特に時間が足りないと感じた.(2件)
- 1講義2コマにして,受講日を半分にしても良いと感じた.
- 実際にロボットが働く現場を見学しに行く機会があればよかったと思う.
- せっかく企業の方に来ていただいているので,講義以外で接する機会を作ってほしかった.
- 企業の方は講義に慣れていないのか,テンポが悪いと感じることがあった.そこが改善されればもっとおもしろく受講できると感じた.
- それぞれの講義が独立しており,どんな技術が使われているかはわかっても,技術をどのように利用するのかが理解しづらかった.共通のテーマを元に講義が進んでいるとより理解が深まると感じた.
- ロボットに関しての概要は理解できたが,細かいところまでは理解できなかった.
- 英語のスライド,説明では,内容を理解するのが一層難しかった.
- もう少し画像や映像を用いて講義してほしかった.文章だけでは疲れてしまう.
- 受講内容を学生が選択できると良かった.
- テスト(課題)の解説をして欲しかった.
- 企業の方は説明形式で,先生方は授業形式のスライドになってしまうため,後半はあまり興味をもてる分野が少なかった.
- 動画の再生に時間がかかってしまう場面が多かったと感じた.もう少しスムーズに進められていれば集中して聴講できると感じた.
- Web上の講義資料は,消さずに残しておいて欲しかった.
- 講義資料のページ数が膨大なため,Webサイトの説明に印刷の必要の有無が記載されているとありがたかった.
- 空調が弱く,暑さで講義に集中できないことがあったので,室温管理をもう少し徹底してほしい.
- 基礎と銘打っている講義では,概念的な部分に大きく時間を割いてほしかった.
- 同じ講義2コマ連続授業ということもあり,自分の集中力が切れてしまい,詰め込まれた内容に対して十分に吸収することができなかった.
講義ごと 感想・意見
1:産業用ロボット概論・歴史(安川電機 井上氏)
- ロボットの歴史と現状,設計や開発について幅広く学ぶことができた.(9件)
- 企業の方の話が聞けて良かった.(3件)
- 映像を用いた説明があり,視覚的にとてもわかりやすかった.(2件)
- 最新の動物の特性を生かしたロボットの紹介がわかりやすくおもしろかった.
- 勉強してきたことが,社会に出て必要になることを実感できた.
- 自分の研究と関連していて,良く理解できた.
- 自分が産業用ロボットに関する研究を行っており,社会における研究の有用性,必要性を再認識することができた.
- 講義内容,伝えたい内容が全くわからなかった.
- 話が少しわかりづらかった.
2:サービス用ロボット概要(安川電機 井上氏)
- 映像を用いた説明があり,視覚的にとてもわかりやすかった.興味をもって学べた.(5件)
- ロボットに関する理解が深まった.(3件)
- 企業の方の話が聞けて良かった.(2件)
- ロボット業界のリアルな話を聞くことができて良かった.
- 勉強してきたことが,社会に出て必要になることを実感できた.
- 自分の研究内容と重なる部分が多くあったため,良く理解できた.
- サービス用ロボットについての概念やその考え方,実際に存在するサービスロボットの構造などを知ることができ,とてもためになった.
- 講義内容,伝えたい内容が全くわからなかった.
- 話しが少しわかりづらかった.
3:医療・リハビリ用ロボット(産業医科大学 和田准教授)
- 医療・リハビリ用ロボット分野の現状や今後発展するための問題点などわかりやすく,良く理解できた.また,それらについて自分で考える良い機会だった.(9件)
- 映像を用いた説明が多くあり,視覚的にとてもわかりやすかった.(5件)
- 興味がある分野であったため,とてもおもしろく,よく理解できた.(3件)
- 自分の研究に対して,参考となることが多くあった.
- 研究を進める上での考え方を学べた.
- この講義で紹介されたロボットにとても興味,関心がわき,就職活動の参考にもなった.
- 実物を触って体感できるとさらに良いと思う.
- 医療関係に興味がなく,そこまで重要と思わなかった.
- 講義1,2と内容が少し似ていた.
- 介護用ロボットの研究の話に関心が持てず,退屈に感じてしまった.
4:知能創発型・人間共生型ロボット(九州工業大学 我妻准教授)
- 自身の研究と関係しており,非常にイメージがしやすく楽しかった.(2件)
- 授業を英語でしていただけたので理解し易かった.
- 映像を用いた説明が多くあり,視覚的にとてもわかりやすかった.
- 人間の知能や感性に関わることに興味があり,楽しく受講できた.
- 自動運転について,具体的な内容を学習することができたので非常にためになった.
- 初めての英語を交えた講義でとても刺激になった.
- 課題が挑戦的で,視野を広げられた.
- 英語と日本語の両方を使っている状態で,授業速度も速く,理解するのが難しかった.(2件)
- クルマとロボットの話の関連性がよくわからず,要点がつかめなかった.(2件)
- 講義内容の濃さに対して,講義時間が短かった.
- 講義内容がほとんど理解できなかった.
5:音声対話技術とヒューマンロボットインタラクション(ホンダ・リーサチ・インスティチュート・ジャパン 船越氏)
- 研究に活かせる内容が幾つもあった.(2件)
- 興味のある分野であり,とてもおもしろく,ためになった.(2件)
- 内容が簡潔で,説明もとてもわかりやすく,興味をもって受講できた.スライドも見やすかった.(2件)
- 企業の方の話が聞けて良かった.
- 勉強してきたことが,社会に出て必要になることを実感できた.
- 映像を用いた説明が多くあり,視覚的にとてもわかりやすかった.
- 課題が,対話ロボットについて開発提案書にまとめるというもので,意欲的に取り組むことができた.
- 今まで触れたことのない分野であり,話が進むにつれて話に付いていけなくなった.
6:人間の感性に基づく商品づくり(TOTO 植木氏)
- ものづくりに対する考えや社風を聞く機会はあまりなく,TOTOのものづくりに対する考え方に非常に好感を持てとても良かった.(6件)
- 今までに深く考えたことのない視点からの商品開発についての講義だったため,新鮮な感覚で受講できた.ロボットの設計・開発にも人間の感性は欠かせないはずであり,改めて考えるいい機会になった.(4件)
- 興味のある分野であり,人間工学を考慮した形状設計などについて勉強できてよかった.(2件)
- ユーザに対して思いやりを持つことは,今後の自分の研究においても大切なことだと感じた.(2件)
- 身近な製品についての話であり,製品の開発についての説明がとても理解しやすかった.
- 企業の方の話が聞けて良かった.
- 勉強してきたことが,社会に出て必要になることを実感できた.
- 映像を用いた説明が多くあり,視覚的にとてもわかりやすかった.
- 講義はおもしろかったが,ロボット工学とのつながりがあまりわからなかった.(2件)
- 一連の講義の中で若干ずれた内容だったと感じる.
7:工場自動化の現状(大分キヤノン 大畑氏)
- 実際に企業で行われている生産技術の特徴,問題点,改善点などが学べ,とてもためになった.(3件)
- 企業の方の話が聞けて良かった. (3件)
- 消費者に向けたものづくりの考えが聞けて良かった.
- 技術領域とは別に求められる人材像や社会人としての必要なスキルについても教えていただき,とてもためになった.
- 勉強してきたことが,社会に出て必要になることを実感できた.
- 自身の研究と関連があり,非常にイメージがしやすく,興味深い内容だった.
- 映像を用いた説明が多くあり,視覚的にとてもわかりやすかった.
- 内容が簡潔で,説明もとてもわかりやすく,興味をもって受講できた.スライドも見やすかった.
8:力学・機構1(九州工業大学 石井教授)
- 自身の研究と関連があり,よく理解できた.(3件)
- 具体的にロボットと力学の関連性が,図によって明確に理解できた.
- ゆっくり,わかりやすい解説だったため,よく理解できた.
- ロボットの目的地までのナビゲーション(センサベースアルゴリズム)の話が興味深く,おもしろかった.
- 課題があまり難しくなく,楽しく取り組めた.
- ロボットの移動制御のパターンがたくさんあったことを知れたのでおもしろかった.
- 自身の専門分野とは異なっているが,プログラムでの考え方などはためになった.
- 講義内容が難しく,理解するのが難しかった.(5件)
- 講義の内容は非常に興味深かったが,所々話が抽象的で理解が追いつかない部分があった.
- 配布資料の項目などのイメージが難しかった.特に,動作について,フローチャートとかみ合わなかったりすることがあった.
- 課題が少し難しく感じた.
9:力学・機構2(九州工業大学 園田特任准教授)
- 扱ったことのある内容だったためよく理解できた.
- 今後,研究でもよく使うと思う内容なのでためになった.
- 機構やロボットについて動画を交えての紹介だったため,よく理解でき,また興味をもって楽しく受講できた.
- 機械系の知識がほとんどないため,授業内容が難しく,あまり理解できなかった.(4件)
- 課題用に紹介があった解析ソフトの使い方がわからず,使用できなかった.(2件)
- 計算式が多く,どれを適用したらいいかあまり理解できなかった.
- 日本語と英語で交互に説明していて混乱した.できれば日本語のみで説明してほしい.
10:CAD/CAM基礎1(切削加工系)(九州工業大学 水垣教授)
- 自身の専門に関連があり,よく理解できた.(3件)
- 映像を用いた説明が多くあり,視覚的にとてもわかりやすかった.
- 今まで知る機会のなかった,工作機械について学べ,とてもためになった.
- インターンシップで工場に行く前に工作機械についての知識が得られ,とても勉強になった.
- レポートの内容が,世界での工作機械の需要供給などの傾向を知るために役にたった.
- 専門的な内容が多く,専門用語や講義内容を理解するのが難しかった.(9件)
- 実際にCADなどを用いる演習の方が良かったように感じた. (2件)
- 受講する前はCAD/CAMの使い方についての講義だと思っていたため残念だった.(2件)
- 講義内容が高専本科で学習したものであったため復習のような感じであり,もっと最新技術の紹介などをして欲しかった.
- スライド内に日本語と英語が混在し,理解できないまま次のスライドへ進むことが多かった.
11:CAD/CAM基礎2(塑性加工系)(北九州市立大学 松永教授)
- 自身の研究と関連性があり,よく理解できた.(3件)
- 今まで知る機会のなかった,塑性加工について学べ,とてもためになった.
- CADや3Dプリンタについて知りたかったので勉強になり,とても興味をもった(2件)
- 実際の作成したモデルを参照しながらの説明であったため,非常にわかりやすかった.モデルも,生徒が興味を示すようなモデル(映画のアイアンマン,アンパンマン,ミニ四駆)であったため,授業に対して積極的に取り組むことができ,結果身につきやすいと感じた.
- 専門的な内容が多く,専門用語や講義内容を理解するのが難しかった.(8件)
- 実際にCADなどを用いる演習の方が良かったように感じた.(2件)
- 受講する前はCAD/CAMの使い方についての講義だと思っていたため残念だった.
- ロボットとの関連性をあまり見出せなかった.
- CAMについてもう少し触れてほしいと感じた.
- 概要がほとんどで,具体性がなかった.
- 金属の材料的視点の話が良く分からなかった
- 缶の構造や素材について説明する必要があったのか良くわからなかった.
12:ロボット向け電子回路基礎1(九州工業大学 田向准教授)
13:ロボット向け電子回路基礎2(九州工業大学 田向准教授)
- 講義がとてもわかりやすく,ためになった.(7件)
- 自身の研究と関連性があり,よく理解できた.(4件)
- 自身の研究に参考になる内容が多くあった. (2件)
- 実際のロボットを用いた説明や,ロボットの構成の基礎に合わせた簡単な問題を解くことで,内容が理解し易く勉強になった.(3件)
- マイコンやFPGA,PCの値段や処理速度など,どういった場面で使い分けるかという話はとても興味深かった.
- 授業後に課題を提出するのは大変だが,授業をちゃんと聞いていれば問題ないと思った.
- 機械系が得意で,ロボット向け電気回路に対して苦手意識があり,自分から興味をもって取り組むことができなかった.
- 専門的な内容が多く,専門用語や講義内容を理解するのが難しかった.(13件)
- 基礎という講義タイトルだが,基礎的な部分をあまり話していない印象を受けた.もう少し基礎的な話をして欲しかった.(2件)
- 専門用語を積極的に使うのではなく,わかりやすい言葉に直して説明してほしかった.
- 最後にロボットの競技会についての話があったが,自分は講義内容が難しくついていけていなかったため,その時間を削って電子回路について詳しくゆっくり話を聞きたかった.
14:制御理論基礎1(九州工業大学 猪平講師)
15:制御理論基礎2(MATLAB/Simlink演習)(九州工業大学 猪平講師)
- 制御の簡単な知識とともに,MATLABの使い方を学べる授業は非常にありがたかった.MATLABでの実装をしながらの講義だったため,理解も深まった.(11件)
- 丁寧に時間をかけて細かい部分についての説明があり,配布資料も見やすく,とても理解しやすかった.(6件)
- 自身の研究と関連性があり,よく理解できた.(3件)
- 講義内容を今後の研究に生かせる.
- 初めて制御に触れる自分としては,制御を学ぶための入門編の授業として難易度が丁度良かった.
- 課題の難易度を自身の理解度に合わせて選択できたのが良かった.
- 飯塚でも受講できるようにして欲しい.(2件)
- この講義のような演習形式の講義を増やすと良いと思う.
- 自身の専門が制御系のため,講義内容が基礎的であまり得られるものがなかった.
- 講義後の課題用の時間が少なかった.
- 状態空間表現と伝達関数を現代制御と古典制御というワード用いず平行に説明しており,制御について学んだことのない人は少しわかりづらいのではなかと思った.
- 受講生が資料を見ながら黙々と作業を進める印象があった.講義として自身で作業をしていくといった内容で良かったのか疑問が残った.
総合実習ルーブリック集計結果(2015年度)
今年度は、ルーブリックを試行的に用いて履修生たちの達成度を確認しました。試行のため、すべての総合実習で実施しているわけではありません。

設問
集計結果
移動ロボット制御総合実習/Moving robot control(2015/08/17-28)
自動運転支援センシング技術総合実習/Driver assistance sensing technologies(2015/08/17-28)
機械設計加工・モデルカー製作総合実習/Mechanical design processing and car modelling(2015/08/17-28)
3実習成果報告会(2015/08/28)
小型EV車自動運転制御総合実習/Small-size EV autodriving control (2015/08/31-9/11)
@ホームサービスロボット製作総合実習/@home service robot manufacturing(2015/08/31-09/11)
2実習成果報告会(2015/09/11)
認識プログラミング総合実習/Recognition programming (2015/08/24-09/18)
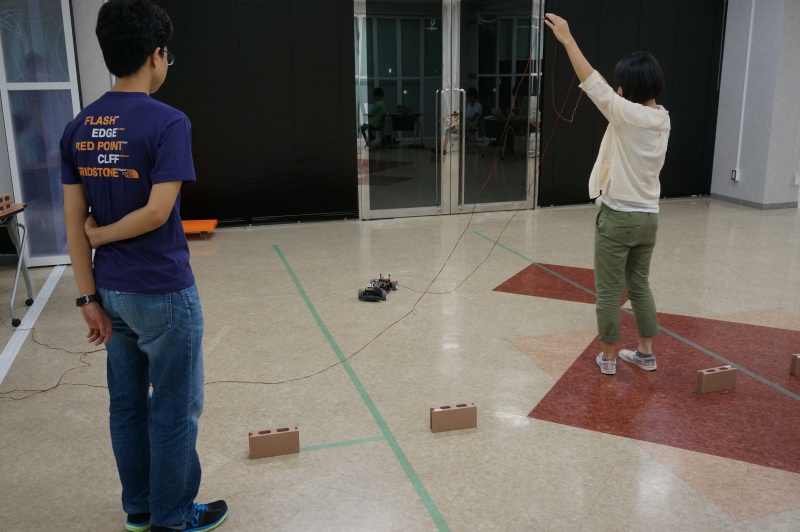
ミニカー/ミニロボ製作総合実習/Minicar / minirobot manufacturing (2015/07/13-22,2015/10/05-16)
移動ロボット制御総合実習/Moving robot control
平成27年8月17日から8月28日まで、九州工業大学にて、高専インターンシップ生4名を含む14名で実施しました。

MATLAB・Arudino基礎講義

モータ制御演習
モータ制御演習
3DCAD演習

設計品を3Dプリンタで加工

ロボットの構造について講義

移動ロボット部品

移動ロボット組立演習

移動ロボット組立演習

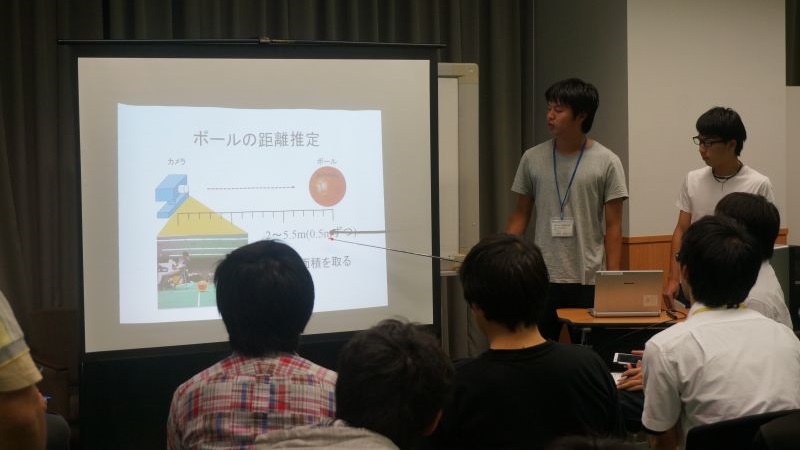
サッカーボール追跡演習

サッカーボール追跡演習

コンテスト準備

コンテスト準備
成果発表

成果発表

コンテスト

コンテスト

コンテスト
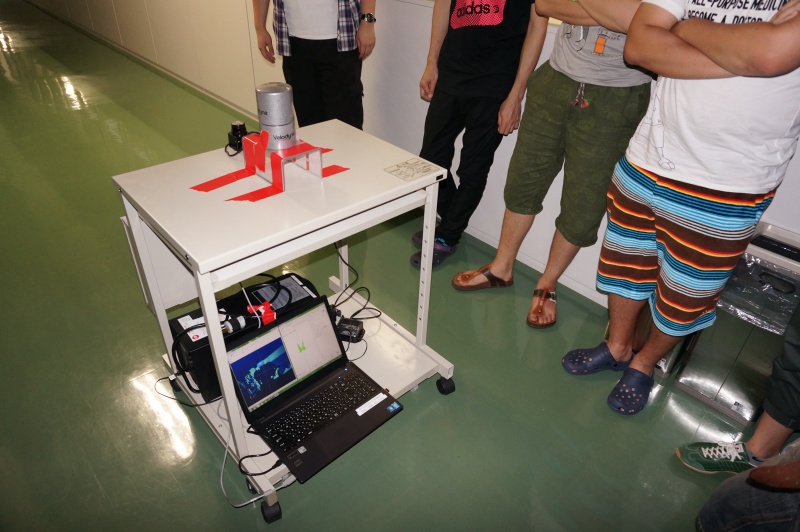
自動運転支援センシング技術総合実習/Driver assistance sensing technologies
平成27年8月17日から8月28日まで、北九州市立大学にて、高専・他大学インターンシップ生3名を含む13名で実施しました。

ガイダンス

ミニカー演習

ミニカー演習

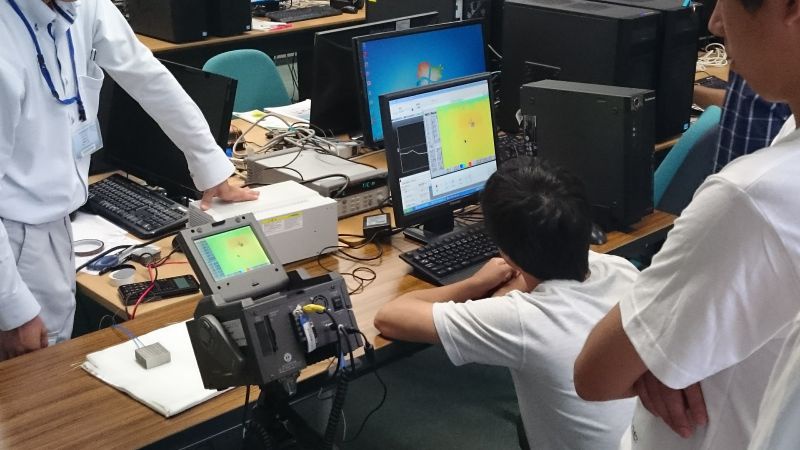
データ計測実験

データ計測実験

センサを取り付けた車両

センサを取り付けた車両

車両を用いたデータ計測実験

車両を用いたデータ計測実験

計測データ確認

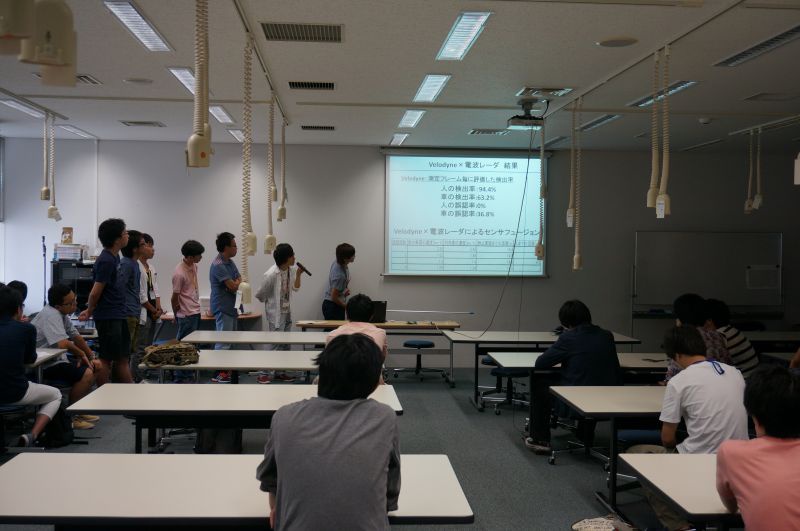
認識プログラム作成演習

認識プログラム作成演習

認識プログラム作成演習

認識プログラム作成演習

実習成果実演

実習成果実演

成果発表
成果発表
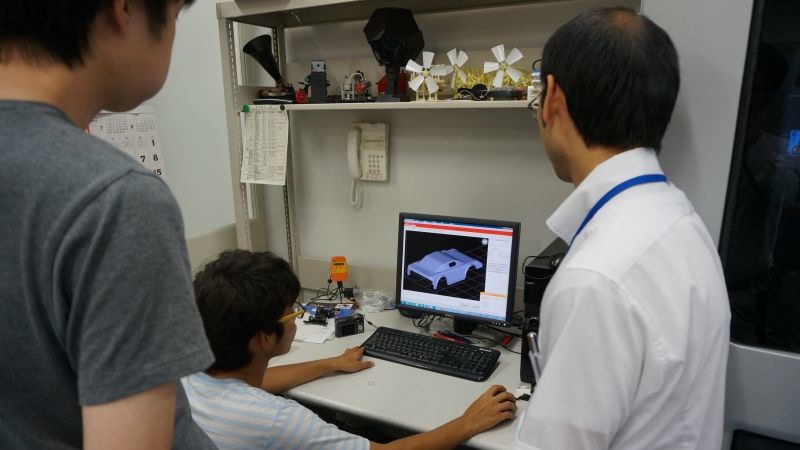
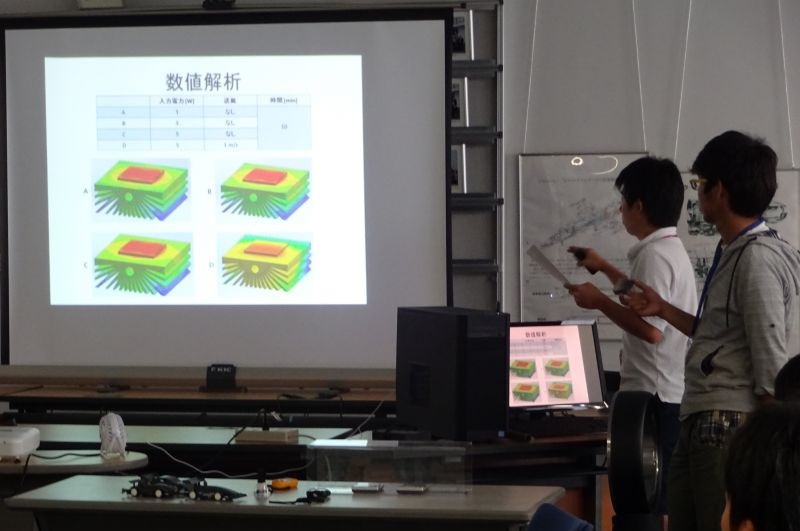
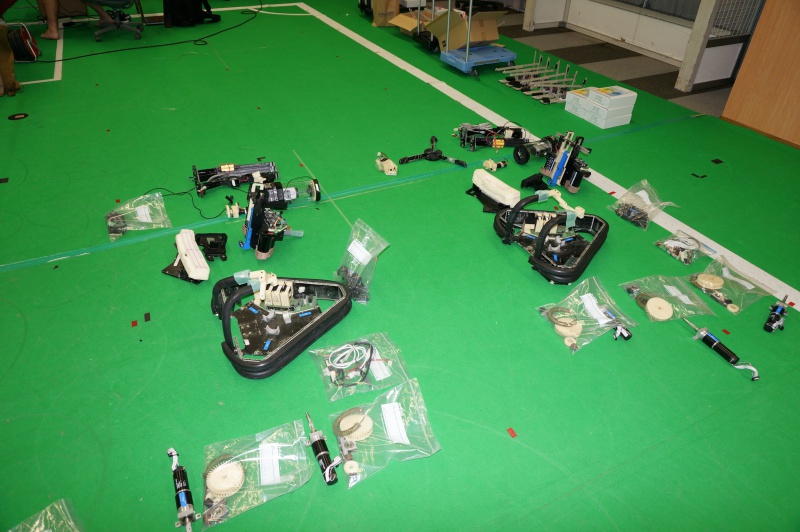
機械設計加工・モデルカー製作総合実習/Mechanical design processing and car modelling
平成27年8月17日から8月28日まで、北九州市立大学にて、高専インターンシップ生1名を含む7名で実施しました。

3DCAD演習

ワイヤカット放電加工機見学
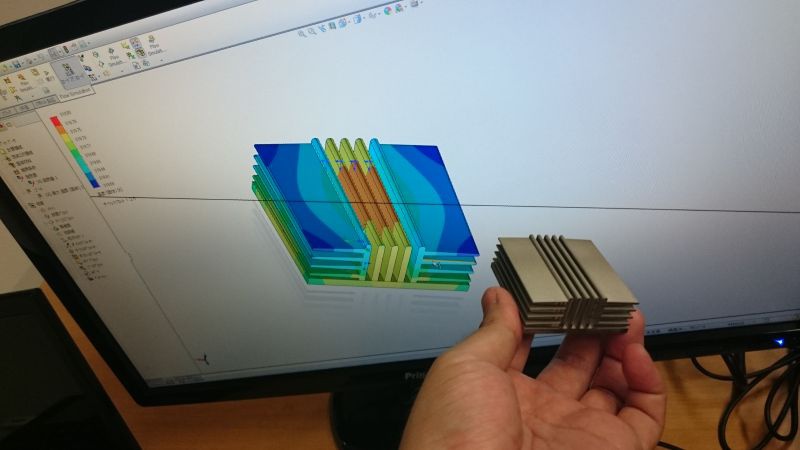
ヒートシンクの設計図と加工品
ヒートシンクの加熱・冷却実験

3Dスキャナによる人体計測

3Dプリンタによる造形

スキャンデータと加工品
ミニ四駆ボディ設計

空力特性シミュレーション
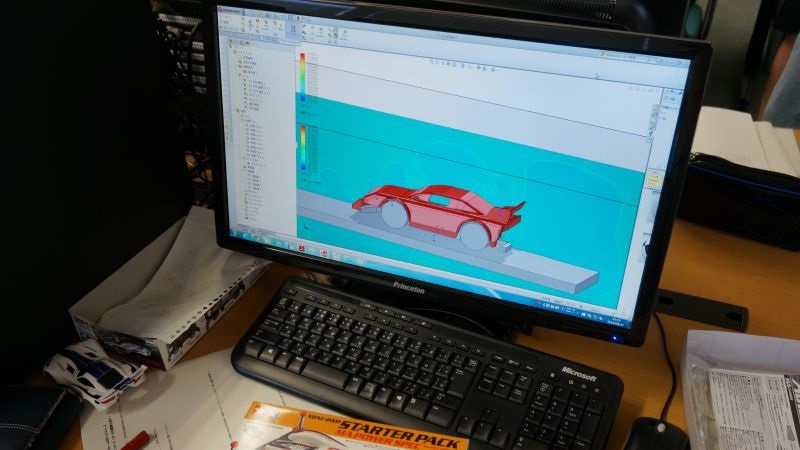
空力特性シミュレーション
3Dプリンタによる造形
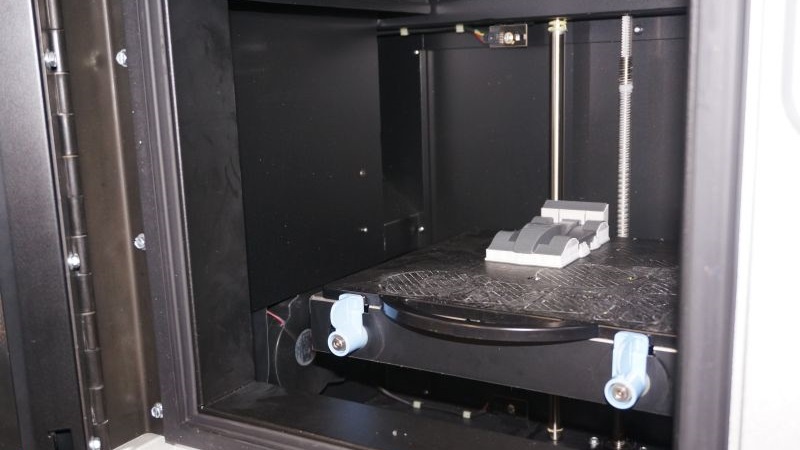
3Dプリンタによる造形

風洞装置見学

風洞実験装置作成
成果発表

コンテスト(風洞実験)

コンテスト(走行実験)

製作したミニ四駆ボディ
3実習成果報告会(2015/08/28)
移動ロボット制御総合実習、自動運転支援センシング技術総合実習、機械設計加工・モデルカー製作総合実習の3実習が平成27年8月28日に終了し、成果報告会を九州工業大学生命体研究科棟1階ロビーで行いました。3実習のそれぞれでコンテストを行い、最優秀賞などを決定し表彰しました。

移動ロボット成果報告

移動ロボット実習表彰

移動ロボット実習表彰

移動ロボット実習表彰
センシング実習成果報告
センシング実習表彰

モデルカー製作実習成果報告

モデルカー製作実習表彰

集合写真
小型EV車自動運転制御総合実習/Small-size EV autodriving control
平成27年8月31日から9月11日まで、早稲田大学にて、高専・他大学インターンシップ生7名を含む19名で実施しました。

MATLAB演習

小型EV車による実習

小型EV車による実習

画像処理演習

画像処理演習

画像処理演習

小型EV車による実習

小型EV車による実習

小型EV車による実習

小型EV車による実習

小型EV車による実習

成果発表

コンテスト

コンテスト

コンテスト
@ホームサービスロボット製作総合実習/@home service robot manufacturing
平成27年8月31日から9月11日まで、九州工業大学で、高専・他大学インターンシップ生9名を含む14名で実施しました。

ガイダンス

デモンストレーション

ROS演習

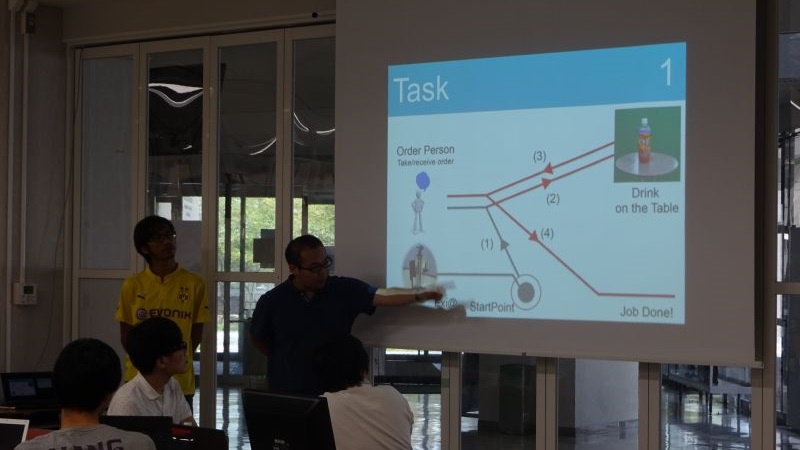
タスク設計演習

画像処理演習

FPGA演習
全方位移動台車制御演習

SLAM演習
中間成果報告会

システム統合演習

システム統合演習
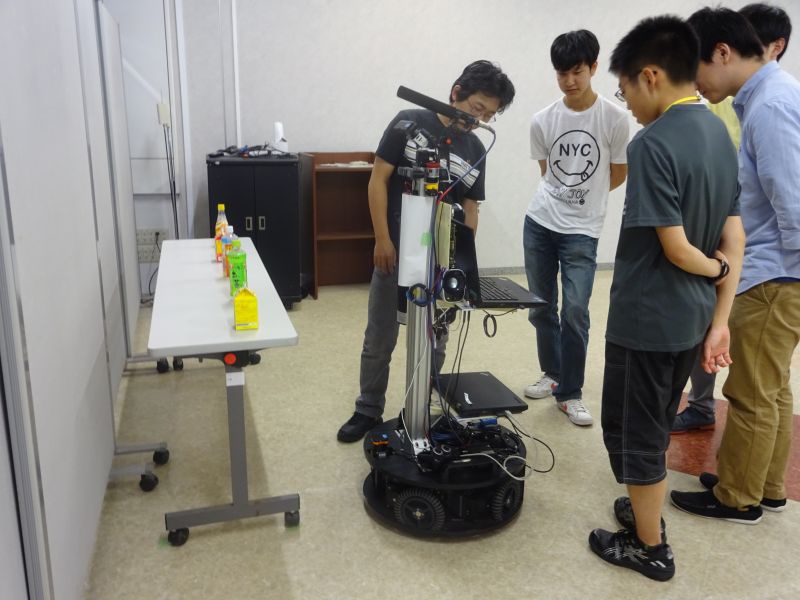
システム統合演習

システム統合演習

成果発表

コンテスト

コンテスト

コンテスト

コンテスト
2実習成果報告会(2015/09/11)
小型EV車自動運転制御総合実習,@ホームロボット製作総合実習の2実習が平成27年9月11日に終了し、成果報告会を九州工業大学生命体研究科棟1階ロビーで行いました。2実習のそれぞれでコンテストを行い、最優秀賞などを決定し表彰しました。

成果報告会の様子

小型EV実習成果報告

小型EV実習表彰

小型EV実習表彰

サービスロボット実習成果報告

サービスロボット実習表彰

サービスロボット実習表彰

集合写真

集合写真
認識プログラミング総合実習/Recognition programming
平成27年8月24日から9月18日まで、九州工業大学飯塚キャンパスにて、履修生6名で実施しました。

バック誘導実演

バック誘導実演

移動物体検出実演

発車誘導実演

運転手監視実演

運転手監視実演

運転手監視実演

成果発表

成果発表

成果発表

表彰

集合写真
ミニカー/ミニロボ製作総合実習/Minicar / minirobot manufacturing
平成27年7月13日から7月22日、10月5日から10月16日の2回,九州工業大学にて、海外インターンシップ生5名(前半2名,後半3名)で実施しました。
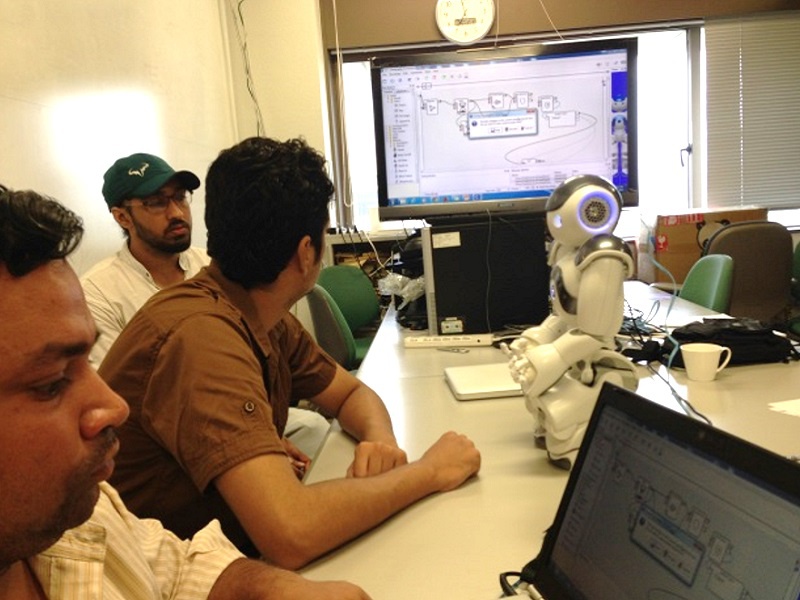
ヒト型ロボット制御

多脚ロボット設計(前半)

多脚ロボット製作(前半)
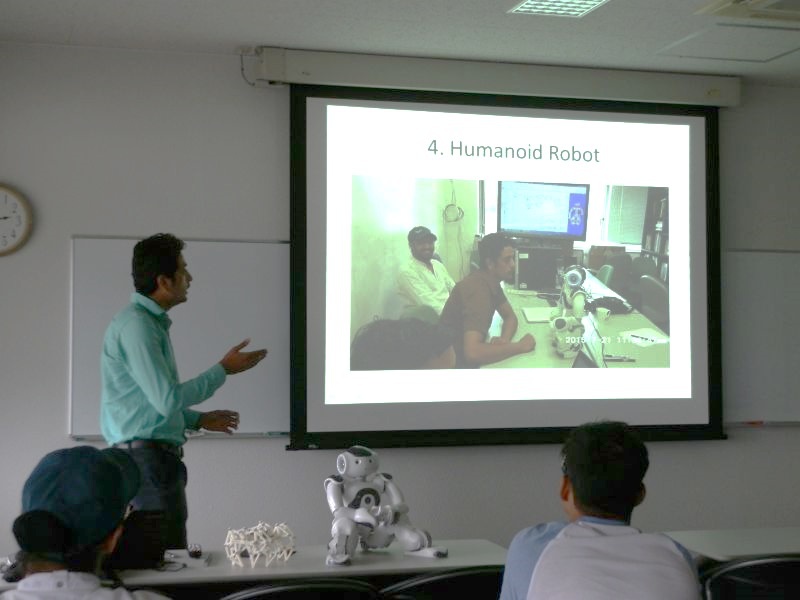
成果報告(前半)
成果報告(前半)

成果報告(前半)

表彰(前半)
表彰(前半)

集合写真(前半)
3DCAD演習(後半)

多脚ロボット組立(後半)

多脚ロボット組立(後半)
コンテスト準備

コンテスト準備

成果報告(後半)

コンテスト(後半)

コンテスト(後半)

表彰(後半)
表彰(後半)
表彰(後半)

集合写真(後半)
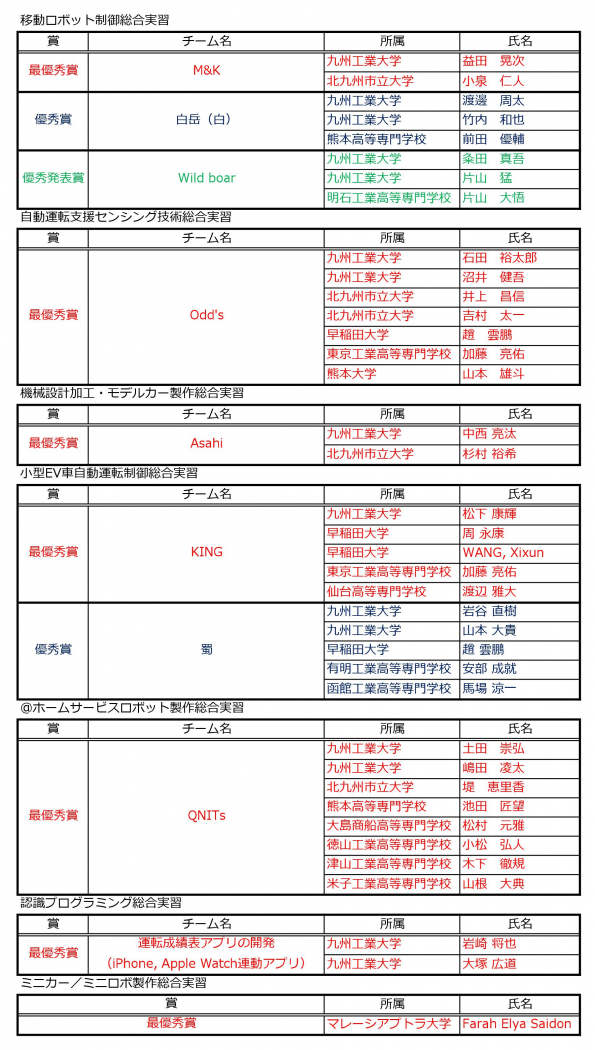
各総合実習 表彰者
総合実習受講生アンケート結果(2014年度)
・小型EV車自動運転制御総合実習
・自動運転支援センシング技術総合実習
・移動ロボット制御総合実習
・@ホームサービスロボット製作総合実習
・ミニカー/ミニロボ製作総合実習
・認識プログラミング総合実習
「ロボット工学概論」アンケート結果(2014年度)
・全体の進め方について 感想・意見
・講義ごと 感想・意見
・機械加工実習受講者 感想・意見
総合実習受講生アンケート結果(2014年度)
小型EV車自動運転制御総合実習
実習に参加した感想
- 大学生や、院生の方たちと一緒に学んだり、一つの目標に向かって作業をするという普段では経験できない体験をすることが出来たので、良かったです。また、私は班の代表として他の方の前でプレゼンを行う事も出来、今後の改善点なども見つけたり、伺うことが出来たので、非常にいい経験を得ることが出来ました。今後、似たような機会がありましたら是非参加したいと思いますし、また後輩たちにも参加してもらいたいとも思っています。(高専・学部インターンシップ生)
- 始まる前は、どのような実習でどんな人達と実習していくのか分からず不安でしたが、いざ始まると講義も分かりやすく、先生方や一緒に実習を進めていく班の仲間とも仲良くなれ、開発も分担しながら進められました。とてもいい開発環境だったと思います。(高専・学部インターンシップ生)
- MATLAB、SIMULINKの基礎知識身に付けることが出来た。制御工学の振動現象(整定時間)を実施に電気自動車の走行軌道で確認することが出来た、またPID制御のゲイン変更や一時遅れ関数を組込むことによりその振動現象の改善効果を実感できた。(カーロボ履修生)
- Matlab/Simulinkを利用した小型EV車(COMS)の制御実習は研究でも利用できる内容であり、さらに最先端の自動車技術を学べたため、非常に良い経験となりました。また実際にモノを制御するため、座学などの授業と比べて知識が身についたと感じました。(カーロボ履修生)
- 私はこの実習を通して、自動車の制御の難しさを学んだと同時に制御の面白さを体験することができました。実習で使用したソフトウェア「MATLAB/Simulink」は私が所属している研究室でもロボットの制御に用いており、これから研究を進めていく上で重要なスキルをこの実習で身に着けることができました。また、小型EVの制御系設計を行うことで、ハードウェアを壊さないようにするための制御系を設計できる思考が身についたことは良かったと思います。本演習では、小さなロボットカーだけでなく実際の小型EVを用いて制御演習を行うことができたため、大きな制御対象ならではの問題点なども多かったです。しかし、社会に出て扱い制御対象のほとんどはこのような大きさのものであるため、素晴らしい体験ができたと思います。また、班員全員で役割を分担しながらお互いに議論し合い、積極的に作業できたことは良かったと思います。(カーロボ履修生)
- とても貴重な体験をできたと思う。普段の研究で使わないソフトウェアなどを使うことができたことが参加して良かった点である。(カーロボ履修生)
改善した方が良いと思う点
- 天候によって使用できる機器に制限等が出来てしまったので、天候に左右されない環境が欲しいと思った。EV車が4台に対して積載バッテリー用の充電器が2つしかなく、順番で回す必要が出てしまったので、車輛台数に合わせたバッテリーが欲しいと思った。
- 開始時間、終了時間があいまいで、戸惑った。応募した時点での実習計画との大幅な変更はない方がよい。
- 今回の実習はグループを分けて競争する形ですが、グループ間のコミュニケーションは今よりもう少し多くなったら、更に他の人の考え方などから勉強になれるではないかと思います。
- それぞれの制御用の車で制御方法が異なったため、もう少し詳しくハード、ソフトの説明をしたらよかったと思います。また実習の途中で無線LANがつながらないトラブルがあり、何もできない状況があったため、そういった状況をなくすようにしたら、良かったと思います。さらに、自動運転にはカメラやGPSなどの機能が備わっていますが、2週間という短い期間では実装することが難しかったため、もう少し導入の部分を削り、車の制御への時間を多くするなど改善した方がいいと思います。
自動運転支援センシング技術総合実習
実習に参加した感想
- この実習に参加したことで、今まで全く知らなかった新しい分野に触れることができいい経験となりました。ここで得た知識を直接自分の研究に活かすことは難しいですが、どこかで糧になると思います。また、私達のグループは努力が実り、最優秀賞をいただくことができ、とても嬉しく思います。周りが院生の方ばかりでしたが皆さんとても良い方で、多くのコミュニケーションを取れましたし、ディスカッションも活発に行うことが出来ました。これが最優秀賞をとれた要因ではないかと思います。総合的に見てとても充実した実習となりました。(高専・学部インターンシップ生)
- 私の学校の学科のカリキュラム内にプログラミングに関する物がなかったので今回の実習は新鮮でより良いものになった。本実習の目標は人、車の台数の検出であったが結果として検出までは至らなかったが、通常では得られない経験、他分野の様々な考え方や、工夫点など非常に有用な物が得られたのでこの2週間はとても充実していました。今回の体験を基に以降の技術に対する生活をより良いものにしたいです。(高専・学部インターンシップ生)
- 今回初めて参加しましたがとても勉強になりました。特に僕が参加した自動運転支援センシング技術はテレビでも最近よく見る今話題の最先端技術です。以前から興味があり、自動運転技術の今を実際に触れてみてとても楽しかったです。確かに新しいことばかりでうまくいかないことのほうが多かったです。しかし習うことのほうが多かった分、その分ますます興味が出てきたので良かったと思っています。また、他高専の方々や他大学の方々との交流ができたのもよい経験になったと思います。同じ高専でも技術力の高い方ばかりで自分の未熟さを思い知り、いい刺激になりました。ほかの学校の学生と交流する機会がなかなかないので楽しかったです。ほかにもラボツアーや日産のリーフの見学会などの実習以外の体験も印象に残っています。それぞれの大学がどんな研究をしているのかが知れてよかったです。今回のカーロボ連携大学院で学んだことはいつか必ず役に立つと思います。これからもさまざまなことを勉強していくと思いますが、今回勉強したことを忘れずに活かせていけたらいいなと思っています。(高専・学部インターンシップ生)
- 今回の実習に参加することによって、自動運転がどのような技術であるかを体感することができ、より身近な問題としてとらえることができるようになった。(カーロボ履修生)
- すごく有意義な時間を過ごせた。プログラミングが慣れていない人は苦労しているようだった。(カーロボ履修生)
- とてもいい経験です、自分の研究に関して、楽しかったです。(カーロボ履修生)
- 普段出来ない貴重な経験が出来て良かった。2週間という短い時間で結果を出すということはとても難しかったが、仲間と協力して1つの事を成し遂げるということが良い経験になった。(カーロボ履修生)
改善した方が良いと思う点
- できればもう少し長く滞在して、より難しい課題を実現したかったです。
- 一緒に実験のデータを取ったら、いいと思います。
- 実習時間がもう少し長ければ良かったと思った。
移動ロボット制御総合実習
実習に参加した感想
- 実際のモノに触れることで,普段,学校で勉強していることをよく理解することができた。与えられた課題に対して完ぺきではなかったがチームメンバーと協力することで達成することができた。(高専・学部インターンシップ生)
- 自分が今学校で習っていることよりも内容が難しく苦労しましたが、とてもためになりました。(高専・学部インターンシップ生)
- 想像以上に高度なことをやったためいろいろと大変だったが,確実に自分の力になったと思う。参加して本当によかった。実際の制御に触れたことで,ロボットの制御分野に対して今まで以上に興味を持った.これから頑張っていきたい。(高専・学部インターンシップ生)
- 他の実習の競技を、見学できたのが良かったです。どのように車に、技術を使用していくのかが良く分かりました。車やロボットを実際に使用した実習は、とても面白く、実践的な技術を身につけることが出来たと思います。(カーロボ履修生)
改善した方が良いと思う点
- スライドやソースコードの誤植を訂正すること。印刷したときに,ブロック図が見づらくなっているときがあること。SimLinkブロックの説明一覧を用意してもらえると効率的に取り組むことができること。
- 内容が難しくていまいち理解できないまま実習が進んでいったので,もう少し理論の説明をして欲しい。また,サンプルプログラムについてもっと解説をして欲しかった。
@ホームサービスロボット製作総合実習
実習に参加した感想
- プログラムやそれぞれのものを統合させる作業など,機械工学科では普段経験できないようなことを経験させていただき,とても勉強になったインターンシップでした。また,学生の方々から大学での生活のことや,ラポツアーでいろいろな研究室の研究を見させていただき,ロボット以外のことについても興味が持て,とても充実した2週間でした。(高専・学部インターンシップ生)
- 今回、私は@ホームロボット製作において画像処理を担当しました。その中で、顔認識や人物追跡のアルゴリズムの利便さを知り、もっと詳しく知りたいと思いました。アルゴリズム自体はブラックボックスで使用していましたが、これからその内容を理解し今後の研究に役立てたいと思っています。実習全体については、非常に充実したものだったと思います。実習中は先輩方に丁寧に支援していただき、休憩時間や休日などはご飯や遊びに連れて行ってもらい、非常に楽しかったです。実習期間については、2週間という限られた期間の中それぞれが協力しロボットを作りあげることができましたが、やはり短い期間が最後の完成度に響いたと実感しました。それらの経験も含め、自分にとって有意義な実習となったと思います。(高専・学部インターンシップ生)
- 実習の内容はとても濃く、体力的にも厳しいところがありましたがとても興味深く面白いインターンシップでした。今後のロボットの新たな可能性や明るい未来を見ることができたように思います。(高専・学部インターンシップ生)
- 学部編入や大学院進学する上で、このインターシップは学生が知りたい研究室の具体的な活動内容を知ることができとてもよかった。自分の場合は九州工業大学に進学する訳ではなかったが、もしもっと早い段階でこのインターシップを知っていたら九州工業大学の院に進学を考えたと思う。また実習内容も初めて取り組む内容だったが、事前の準備がしっかりしていて取り組みやすく、それでいてやりがいもあったので参加できてとてもよかった。(高専・学部インターンシップ生)
- 自分が学んだことのない領域の技術や、触ったことのないものに多数触れることが出来たので、良い学習経験になった。また、移動ロボットの基礎的な知識を更に深めることが出来、今後の研究活動に活かそうと考えている。自分はチームリーダーとしての活動も行ったが、それぞれ経験の異なるメンバーをまとめるのは非常に大変だった。メンバーそれぞれの作業の進捗を把握して、チーム全体として足並みをそろえることに重きをおいた。最終的に全体を通してロボットが動いた時は、非常に達成感があった。全体的に、充実した実習であったと感じている。(カーロボ履修生)
- 大変有意義な時間を過ごせたと思う。新しい技術に触れるということで、最初は不安であったが教育体制も整っており(これはコースによるのか、年度によって違うのかは不明)学習もスムーズに進み、最初に概要をつかんでそこから細かい部分の学習に入れたのでモチベーションも維持できたと思う。(カーロボ履修生)
- ロボット向けOSであるROSに触れる良い機会となり、勉強になったと思っている。また、複数人で開発したプログラムを統合して、ひとつのロボットとしてまとめ上げる作業を実際に体験できたことは今後の活動にも役に立つことだと思う。また、他大学や高専からのインターンシップ生とともに作業をすることができ、かなり忙しい2週間ではあったが、それと同時に実習での作業やその後食事に行くなどの交流で密度の濃い2週間を過ごせたと感じている。(カーロボ履修生)
改善した方が良いと思う点
- 実習を終えて、インターンシップの期間が少し短いと感じましたが高専生なども参加することや大学側の予定があることを考えると仕方がないのかなと思いました。SLAMを導入するのが初ということなのでやはりSLAM、タスク設計側の負荷がかなり大きかったのではないかと思います。
- スケジュールがとてもハードでした。もう少し余裕のある内容になればと思います。
- 実習を選ぶ段階で細かい実習内容、実習に必要な前提知識を明確にしてほしい。事前に詳しくテーマ内容が分かっていれば実習や実習のテーマの選び方も変わったと思う。
- 各パートを3つに分担して作業を行ったが、パートごとに作業内容の重さに差があるように感じた。また、すでに作られているプログラムやロボットを用いたが、それらの仕様の説明が不十分な状態でシステム結合の設計を行ったので、後ほど判明した仕様に合わせて設計を大きく変更する必要があり、苦労した。具体的には、サーバの仕様(フラグのやりとりがどのように行われるのか、内部でシーケンス処理は記述できるのか、スループットはどうか等)、台車への指令(速度制御はできるのか、回転運動と並進運動は同時に行えるか等)をもっと早めに知りたかった。
- 1週目は班行動をし,2週目にチームごとの統合をするという形でしたが,統合するのに思いのほか時間がかかり,2週目になって問題が改善できそうな発見を試したりする時間がなかったのが残念でした。
ミニカー/ミニロボ製作総合実習
実習に参加した感想
- 本実習を通して、制御の基礎を学び、それを応用してミニカーを制御するために試行錯誤していく時間はとても充実していました。特に、チームとして考え、助け合いながら実習を行うことで、チームとしての取り組む姿勢について学ぶことができたことが有意義に感じられました。また、見学ツアーを行うことで、大学や各研究室の雰囲気を感じ取ることができ、今後の進路の参考になりました。さらに、カリキュラム以外での交流の場や手厚いサポート、サービスをたくさん用意していただき、心身に負担のかかることなく実習を行うことができました。楽しく、充実した2週間を過ごすことができたことにお礼を申し上げます。(高専・学部インターンシップ生)
- 今回のインターンシップを通じて,制御システム開発の基礎を学ぶことができ、競技課題を通じて実際に動作させる難しさ、重要性を感じました。高専の実習では専攻科・大学院の方と実習をする機会がなかったので貴重な経験ができ、良かったと思います。(高専・学部インターンシップ生)
- 我妻先生の計画の進め方やずれの修正方法はためになったが,実習内容のミニカー組み立ては正直に言うと少し退屈だった。MATLAB班が作ったものをそのまま使えず,実際のミニカーの動きを見ながら微調整をして,あまり制御班のやったことが生きなかった。ただ,これは通信班が渡した速度やステアリング角の情報が正確ではなかった可能性が高いので,そこは反省点だった。(カーロボ履修生)
- 実習を通じて高専生や北九大の学生と交流を持つことが出来てよかった。実習期間が短く感じたのでもう少し長くてもいいと思った。同時期に行われていた@ホーム実習に比べて充実感や疲れ度合いが少なかったと思う。(カーロボ履修生)
改善した方が良いと思う点
- 1週目の実習は時間の余裕が多く、2週目は少なかったので1週目の時間数が多い方が良いと思います。
- 車にセンサを取り付けるなど,制御がもう少し活躍できるようにしてほしい。
- 内容を具体的に詰める。個性を出せるような課題設定にする。複雑な課題にすれば、点数計算は大変になりますが、その分解法も増えて班によって様々な生成経路を編み出すことができると思います。また制御班は理論の勉強時間を長くとるよりも課題用の生成経路を編み出すことに時間を費やしたほうがいいように思えます。
認識プログラミング総合実習
実習に参加した感想
- キネクト、画像処理に関して基本的なことを学べた上にiOSをがっつり関われて非常によかったです。5日間連続の時はきつかったですが、学習定着度は早く良いです。(カーロボ履修生)
- とても良い環境で実習を行うことができ、良い実習であった。課題解決に詰まった際は、先生がアドバイスをしてくれ、毎回確実に力をつけることができた。(カーロボ履修生)
- KinectやiPhoneを使用したプログラミングができ良い経験になった。普段行わないグループでの開発ができ良い経験になった。(カーロボ履修生)
- 貴重な体験ができた。(グループでの活動する機会は少ないため)(カーロボ履修生)
- 普段扱わないデバイスを扱える良い機会になった。自身の研究以外で現実的な問題に取り組むことは少ないので良い経験になった。(カーロボ履修生)
- 複数人で同じシステムの開発を行う機会がこれまでなかったが、実際に演習で行い、よい経験になった。(カーロボ履修生)
改善した方が良いと思う点
- 車の情報(速度、燃料の残量など)をリアルタイムに取得できるシステムがあると今回作ったiOSアプリの比較検証が行いやすいです。例えば、トヨタはプリウスを使って情報取得できるAPIを試験的に用意しています。
- 作業がしづらいことがあったので、可能であればディスプレイがもっと欲しいと感じた。
- 長期にして、単位を認定してほしい。
- この実習日程とその他の集中講義やインターンシップが重なることがあるので、この実習にも単位があるとうれしい。
- 単位が出てくれたら参加意欲が高まると感じた。
「ロボット工学概論」アンケート結果(2014年度)
全体の進め方について 感想・意見
- 前半部分でロボットの現状を知り、後半部分ではロボットを創るのに必要な知識や技術の概略を勉強でき、現状を知ってどのような技術が使われているかという流れになっており理解しやすかった。(重複回答:他10件)
- 全体的に落ち着いた雰囲気で、わかりやすい内容でもあったため理解しやすかったです。実際に企業で働いている方からもお話を聞くことができ、将来設計にも役立ちました。(重複回答:他5件)
- ロボット工学に関して、数学的なアプローチからの講義があったり、実際の企業の方の話を聞けたり、コンピュータのシミュレーションもあったりとバラエティ豊かでとてもためになる講義だったと思います。(重複回答:他16件)
- 1つの科目の中で、さまざまな分野の、より実践的なお話を少しずつかいつまむことができました。その中で興味を持った内容については今後、より深く学んでいけたらと思います。
- 全体としては概論なのでざっくりとした話を聞くことができ,大まかにロボットについての知識を得ることができたと思う.講師と講義の内容がスケジュールに書いてあったことで予め内容を把握できたので非常に授業に出席しやすかった.
- For the whole impressions, I found that this lecture is very useful for students in the department because it like a whole brief big picture about robotics. Hence, the students can get idea and knowledge to pursue with their research after all.
- 全体を通して,この講義に満足しています.たくさんの方からのお話は,とても自分の身になりました.今回,実際にパソコンを使った演習などを行った講義は1コマでしたが,もう少し演習のコマ数を増やしてもいいのかなと思いました.話をただ聞くよりは,実際に演習をした方が,知識も身に付きやすいと思うからです.また,このような講義があるときは,ぜひ受講したいです.(重複回答:他3件)
- 個人的には英語講義をもう少し増やしてもいいかなと思った。専門用語は事前にまとめてくれたら、英語講義が聞きやすくなると思う。
- 毎週別の先生がそれぞれの専門分野の話をしていくというのはとても面白い授業だったと思います。ただし、一人の先生の授業時間が大体1限分だったこともあり、授業のスピードが少し早く、理解できなかった場所がいくつかあったのでここを改善してもらえればとても良かったと思います。
- 大学の先生が講義を担当しても、自分の専門分野について1コマで話すのは無理だと思う。その分内容が薄くなってしまい、分かりにくくなる可能性がある。そのため企業研究も兼ねて、企業の人や卒業生の話を聞けたら面白い講義になると思う。
- それぞれの講義で、分野の違う話が聞けて興味深かった。ただ、レポートの提出方法が様々だったため、統一してほしい。(重複回答:他4件)
- ロボット工学概論、というにはあまりにも一貫性がないように感じた。それぞれ異なる先生や、企業の方が講義をするので仕方ない部分はあると思うが、ロボットでないものも含まれていたり、産業用機械なのかロボットなのか、一体何の説明を受けているのか分からなくなった。全体として、ロボットという点に観点をおいた話を、違った方面から話をしてもらう方が良いと思う。
- It was a good opportunity to attend the classes and learn the different technological understanding required to work in the interdisciplinary field of robotics. From Mechanical engineering to electronics and from biological inspired intelligence to research management. This will help me a lot for my research and future career.
- いくつかの講義でマイクを置いて話すところがあり,音声が聞こえなかった。
- 大きなスクリーンに映るのが若松側のPCの画面のみだったので、講師の方の表情や身振りジェスチャーがまったく伝わらなかった。PCの画面と講師の方を同時に大きなスクリーンで映すことが出来れば、理解の助けとなるかもしれないと思った。(重複回答:他1件)
講義ごと 感想・意見
1:産業用ロボット概論・歴史(安川電機 井上氏)
2:サービス用ロボット概要(安川電機 井上氏)
- 産業用ロボットがどのような制御で動いているのか興味があったため学ぶことができよかった。
- 現在のロボット技術の発展と企業の取り組んでいる事,現在のロボットの問題点などが分かりやすく書かれていて,理解しやすかった.(重複回答:他10件)
- 実際に工場で使われているロボットについて学ぶことができてとても参考になりました。これからの研究にも活かすことができるかもしれない内容でしたのでとても良かったです。(重複回答:他3件)
- 難しい式などを、あまり使わずに、動画などを用いていたので、分かりやすかった。
- Industrial robot Introduction and History, service robots Overview (Yaskawa Electric Inoue) as the lecture content was giving overview of the current trend in industry and the approach of research and development in industry. This is good both with respect to obtaining industry work as well as doing University research.
- 企業の歴史等にはあまり興味が湧かない。
- 安川電機の歴史や産業用ロボットにおける時代的遷移などを教授して頂きましたが,それらの知識が今後どのように活用できるのかを思いつくことができませんでした。
3:医療・リハビリ用ロボット(産医大学 和田准教授)
- 現場の内容を聞くことができ、とてもよい経験となった。(重複回答:他1件)
- 医療の現場にロボットが、どのように活躍しているのかを学べてためになった。
- 医療現場だけでなく、開発中の非産業用ロボットの紹介も多かったので、分かりやすかった。
- 私たちが受講するほかの授業ともっともかけ離れていたため、新たな知識が身につき、また、別な分野への応用性が期待できるのだと思った
- 私が所属する研究室は運動機能障害を有する方への支援装置開発および研究を目的としています。講義内では産医大学で使用されているHALといったスマートスーツの実用例などを詳細に教授して頂き,加えて和田准教授が仰っていた「より良い支援装置を開発するためには,医療現場と開発者の相互認識が必要である」ことなど,今後の研究活動に活かせる講義内容であったと思います。
4:ロボットマーケティング(九州工業大学 ジァン教授)
- とてもわかりやすく,講義全体のテンポが良かった。(重複回答:他1件)
- ロボットにおける技術のみでなく、そのロボットを様々な観点で商業的に生かすことについて説明されていたので、文系的要素が学べて実践的と感じた。(重複回答:他2件)
- 自分たち技術者はモノを作ることが仕事だが、その向こうには自分たちが製作したものを使うお客様がいる。その際、お客様がいったい何を望んでいるのかを把握できていないと、いい製品はできない。そういうことを気づかせてくれる講義だった。
- 工学(ものづくりについて)をマーケティング的に考察されており,これまで想像し得なかった知識を教授して頂いたので、非常に参考になりました。(重複回答:他2件)
- ロボットマーケティングが個人的に新鮮でした。物を作るからには、「役に立つものを」「市場を考えろ」「市場価値」など、マーケティング視点を組みこんだ授業だったのでとても勉強になった。私たちは、大学院を卒業したら、企業に勤めるものがほとんどである。企業で製品を作るにあたって、世の中のNeedsを調べないで、「ただ自分の好きなものを作りました」では、こいつ馬鹿じゃないのかって思われる。そのために、技術者がマーケティングの本質について知るということは、極めて重要なことであることを知った。市場を調査し、売れるものを作る。大量生産大量消費の時代は終わったのだ。消費者だって年々、いろんな知識をつけてきている。売れるものをつくり売れるような販売の仕方をする。そのためには、技術者・生産者・販売者が知識を共有することが重要であると感じた。技術者が物を作って、販売者が売ればいいなんて時代はすぐに終わりが来る。これからの時代はチームマーケティングである。ジァン先生の講義は、来年もぜひ受けてみたいと思った。
- 専門用語などが多すぎて、理解できなかった。
- マーケティングは経済や商業分野ではかかすことはできないことではあるが、専門的に今まで触れたことがない分野の内容で少し理解しづらかったです。(重複回答:他4件)
5:工場自動化の現状(大分キヤノン 大畑氏)
- 自動化に必要なロボットの要素が勉強できた。現在の工場自動化の現状が理解でき、とても興味深かった。(重複回答:他5件)
- 工場でロボットを使用する際、人間とロボットが同じ空間で仕事をする際の危険性について知ることが出来た。
- 工場における自動化を、生産技術の方々の知恵によってより最適なラインを構築するための方法、アプローチを知ることができ参考になりました。
- 生産現場でのロボットの活躍を知れた.就職のときに,学生に求められること,やらなければいけないことが分かり,大学院での学ぶモチベーションが上がった.(重複回答:他3件)
- 企業の方のプレゼンを見ることで、どのような考え方を持っているかや、直面している課題などに触れることができた
6:人間の感性に基づく商品づくり(TOTO 植木氏)
- ユーザからの意見や提案を常にフィードバックし、それを技術開発のきっかけとすることの大切さを学んだ。(重複回答:他1件)
- 実際に広く普及している製品の開発過程などの説明であったため理解しやすかった.またTOTOが身近な製品を作っている企業であることも講義が面白く感じられた理由の一つである.
- 人間の感性と技術の融合に関する話が聞けて、大変興味深かった。(重複回答:他6件)
- 講義の中で自分にとって一番、生活空間において身近に感じたのがトイレの開発をされているTOTOさんのお話でした。新しいアイデアを創造していく工程を知れて、とても面白かったです。
- 生活に身近な話であり、将来商品を考えていくうえで役に立つような話を分かりやすくしてもらえたことがよかった。
- 内容的には面白かったですが、企業説明会に参加している気分になりました。
- TOTOの製品とその開発についての話がほとんどで、ロボットとの関連がよくわかりませんでした。
7:知能創発型・人間共生型ロボット(九工大 我妻准教授)
- 内容が興味深かった。
- 次世代ロボットについて詳しく学ぶことができ、ロボットに対する知識が広がりすごくためになり、かつ非常に興味深い話であった。
- 今後の日本において大事な分野であると感じた。
- 説明に英語と日本語をどちらも用いており、内容を理解しにくかった。どちらかの言語で統一すべきであると思う。説明は日本語でレジュメに英語で書くなど。
- 講義資料が図や文字が小さくわかりづらかった。説明用の資料として不適切と感じた。
- The contents of the lecture basically were about electrics and electronics. It was hard for me to understand as I came from mechanical background. Maybe the contents should be basic for all students so that we can understand in better way.
8:力学・機構1(九工大 石井教授)
- 力学の講義以外にも最新のロボット研究動向がまとめられており,研究者が把握しておくべき情報がまとめられていた.
- これから携わて行く研究と密接に関係している
- 説明が分かりにくかった
9:力学・機構2(英語講義)(九工大 ナシライ准教授)
- The reason why this lecture is the most understood by me is because the full lecture is in English. Plus, the major mechanical things in robotics were well explained through this lecture.
- 英語が苦手なので、英語をもっと勉強しないといけないという刺激にはなったが、内容の理解までは到達しなかった。(重複回答:他11件)
- 全体を通して英語であったため、理解に苦しんだ。せめて資料だけでも日本語の補足がほしかった。(同内容の意見:1件)
10:CAD/CAM基礎1(切削加工系)(九工大 水垣教授)
11:CAD/CAM基礎2(塑性加工系)(北九大 松永教授)
- 図や例えなどをうまく使っており,工夫された講義で内容がイメージしやすく,分かり易かったです。また,講義のテーマ自体がもともと,興味があったということもあり,講義に臨む姿勢も高かったからだと思います。
- 加工技術などの機械分野の講義だったので、理解しやすかった。
- 切削、塑性加工は加工法の中でも重要な役割を担っており、大変興味をそそられましたがもう少し加工法の具体的な理論を説明していただきたかった。
- 研究でCADを使用するため、ためになった。
- 少ない講義時間ではありますが、実際にCAD/CAMを用いた実習を行って貰えれば更に良かったと感じました。
- CAM自体になじみがなく,切削機に触ったことがない自分にとっては,専門用語が多かったような気がした。(重複回答:他1件)
- 工作機械などの「機械加工」により、ロボットの部品を作ることは、私の所属している研究室でも行われているため理解できます。しかし、実際にCADデータを作って送信して削り出す工程に、1コマを使う理由が分かりません。口頭で刃の説明、削り方を提示されても、使用経験が無ければ想像することができませんし、それに伴い、ロボットに(力学的に)どのような影響が出てくるのかも分かりませんでした。
- The CAD/CAM lecture was a little difficult for me to understand well, as the lecture requires a little exposure to mechanical engineering and the capability to work on CAD.
- 3Dプリンターは,有名で知っていたが,その原理などを知りたかった。
12:制御理論基礎1 (九工大 猪平講師)
13:制御理論基礎2(MATLAB/Simulink演習)(九工大 猪平講師)
- MATLABは私の研究でも少し使っているので、MATLABに関する知識を増やすことができたのでためになった。(重複回答:他4件)
- 実際に演習をし、制御の仕方を知ることが出来、このような実践的な授業を増やした方が力になると思った。(重複回答:他5件)
- MATLAB/Simulinkの実習は、初めて使用したにもかかわらず、資料が適切であったため使用方法は理解することが出来た。(重複回答:他2件)
- 制御工学の基礎から学ぶことができ、いい経験になった。
- 座学のみではわからないミスに気づけるため、演習をやってよかった。
- 内容的に分野が違い理解するのが難しく、また、将来自分にとってどのような役に立つのかがわからなかった。(重複回答:他2件)
- 初めて使うソフトで,慣れない中,授業のスピードが速かったように感じます.ソフトの使い方を知るというよりは,プリントに沿って,黙々と作業をしているような気がしました.
- 基本的な仕組み、目的をもう少し詳しく説明してもらいたかった。
14:ロボット向け電子回路基礎1(九工大 田向准教授)
15:ロボット向け電子回路基礎2(九工大 田向准教授)
- 電子回路やマイコン、通信など機械系で知らなかった人でもわかりやすかった。このような授業を別の専門の講義でも行ってほしい。
- この授業では、理論的ではなく実用的な事柄を学べたので、実際にロボットがどのように判断し、動いているのかということを学べて非常に面白かった。普段受講している授業で理論的な授業はたくさんあるが、実際に‘モノ’になったときのことを学べることはあまり無いので新鮮だった。
- 電子回路について、研究に使われているものや、ゲーム機に使われているもの等を例にとって説明があり、興味が惹かれるような内容で、分かりやすかった。
- 講義中の事をそのまま演習にするのではなく少し考えさせるような形式をとり,演習に30分ほど割り当てられていたため,思考意欲が増した。
- 私の研究でD/A変換やA/D変換などを扱うため電子回路の制御について理解することができました。
- 授業スピードが少し速く、当日提出の課題の内容を十分に理解できなかった。
- The contents of the lecture basically were about electrics and electronics. It was hard for me to understand as I came from mechanical background. Maybe the contents should be basic for all students so that we can understand in better way.
- 内容が今まであまり深く習ったことがなかった分野で、時間もなかったためか授業のスピードも少し早かったので少し理解ができなかった場所があったように思います。(重複回答:他4件)
機械加工実習受講者 感想・意見
- 私は情報科なので、普段はCADなどのソフトを用いる機会が無いのであえてこの実習に参加させていただきました。CADは感覚的に操作することができ、想像していたよりも使い易いと感じました。CAMは加工を行なう基礎知識がほとんど無いので、カッターの回転速度や用いる素材による設定の変更など、感覚的に分からない部分はありましたが、設定を確認するためのシミュレーションで確認することができるので、非常に便利であると感じました。今後、CAD、CAMを使う機会はあまり無いと思いますが、幅広い知識を習得するのに良い機会を頂きました。ありがとうございました。
- 今回,加工実習を終えて,設計から製作までの一連の流れを経験することができ,有意義な時間を過ごせたと感じています.まず,solidworksでのモデル設計では,このソフトの使用経験があり,かつ容易な形状であったため,実習前は,そんなに勉強できないなと感じていたが,ソフトの使い方で,普段あまりしないやり方を教わったので,モノづくりする際の経験となったと考えます.次に,CAMに変換し,実際に工作を見学する.これは,CADからCAMへの操作を学びたく思い,この実習に参加したので,とても有意義でした.いろいろな知識を吸収したい気持ちで,多くの質問をし,それに対応してくださって,とても感謝しています.今後は,この経験を活かし,自学を行い,知識を蓄えていきたいと思いました.
- solidworksは使用したことがあったので簡単に作ることができたが、工作機械で作る切削物を設計する際には、設計の手順や拘束条件によるエラーがでてしまうことがあるので定義をそれぞれきちんと行う必要があると感じた、実経験に基づいたエラーを出さない方法を聞くことができたので大変いい機会をいただいたと思っています。ありがとうございました。機会があったら、自分が自由に設計したものを切削してみたいです。
- ロボット工学概論の定員の少ない実習の中,受講できとても感謝しています.実習はCAD・CAMの基本的な使い方,ジグボーラでの切削加工を行い,金型の作成工程を学ぶことができました.私は以前にSolid Works や Auto CADなどCADのソフトは利用したことがあったのですが,CAMソフトは使用したことが無かったので,普段使う機会のないCAD/CAMソフトを利用して実際の加工過程を目の当たりができたのはよかったです.このような実習は機械などの準備が多くできないので,たくさんの人が受講できないですが,私のような加工の流れなど一度も触れたことが無い人にとってはとても充実した実習だったと感じました.
- 今回の機械加工実習は勉強になりましたが、実習と言うよりは見学だったので短時間で学生が出来る実習を設けた方が良いと思いました。
機械加工実習/Machining Practicum (2014/08/01)
小型EV車自動運転制御総合実習/Small-size EV autodriving control (2014/08/18-29)
自動運転支援センシング技術総合実習/Driver assistance sensing technologies(2014/08/18-29)
移動ロボット制御総合実習/Moving robot control(2014/08/18-29)
3実習成果報告会(2014/08/29)
@ホームサービスロボット製作総合実習(2014/09/01-12)
ミニカー/ミニロボ製作総合実習/Minicar / minirobot manufacturing (2014/09/01-12)
2実習成果報告会(2014/09/12)
認識プログラミング総合実習/Recognition programming (2014/08/21-09/16)
機械加工実習/Machining Practicum
ロボット工学概論の番外科目として企画された機械加工実習を、平成26年8月1日に北九大機械加工施設にて、7名の参加者で実施しました。前半の座学および演習では、CAD/CAMの基礎知識の講義およびモデリングとNC命令作成の演習を行いました。後半の演習ではCAD/CAMと加工機(ジグボーラ)の連携を学び、機械加工を行いました。
CAD/CAM基礎講義
CAD/CAM基礎講義

3DCAD設計
CAM演習

CAM演習

ジグボーラによる加工

加工途中の制作物

ジグボーラによる加工
完成した製作物
小型EV車自動運転制御総合実習/Small-size EV autodriving control
平成26年8月18日から8月29日まで、早稲田大学にて、高専インターンシップ生5名を含む16名で実施しました。

講義中

ロボカー制御実装

ロボカー制御実装

小型EV車による実験

小型EV車による実験

小型EV車による実験

小型EV車

制御実装

制御実装

自動運転試験走行

自動運転試験走行

コンテストでの成果発表
コンテストでの成果発表

コンテストでの成果発表

コンテストでの成果発表

コンテスト中

コンテスト中

コンテスト中

コンテスト中

コンテスト中

コンテスト中
自動運転支援センシング技術総合実習/Driver assistance sensing technologies
平成26年8月18日から8月29日まで、北九州市立大学にて、高専インターンシップ生4名を含む12名で実施しました。

演習の様子

演習の様子
センサ実験

センサ実験

センサ付車両による実験

センサを取り付けた車両

センサを取り付けた車両

センサを取り付けた車両

プログラム実装
プログラム実装

センサ付車両によるデータ取得

センサ付車両によるデータ取得

車両実験終了後の集合写真

コンテストでの成果発表

コンテストの様子

コンテストでの成果発表

コンテストでの成果発表

コンテストでの成果発表
移動ロボット制御総合実習/Moving robot control
平成26年8月18日から8月29日まで、九工大若松キャンパスにて、他大学・高専インターンシップ生4名を含む7名で実施しました。

講義中

講義中

演習中
移動ロボット部品

移動ロボット制御

移動ロボット制御

制御実験

制御実験

制御実装

コンテスト準備中

コンテスト中

コンテストでの成果発表

コンテスト中

コンテストでの成果発表

コンテスト中

コンテストでの成果発表

コンテストでの成果発表

コンテスト中

コンテスト中

コンテスト中

コンテスト中
3実習成果報告会(2014/08/29)
小型EV車自動運転制御総合実習、自動運転支援センシング技術総合実習、移動ロボット制御総合実習の3実習が2014年8月29日に終了し、成果報告会を九州工業大学生命体研究科棟1階ロビーで行いました。3実習のそれぞれでコンテストを行い、最優秀賞などを決定し表彰しました。

成果報告会の様子

成果報告会の様子
小型EV車実習表彰式
小型EV車実習表彰式

成果報告会の様子
センシング実習表彰式
成果報告会の様子
移動ロボット実習表彰式

移動ロボット実習表彰式

実習成果報告会の様子

集合写真

集合写真
@ホームサービスロボット製作総合実習/@home service robot manufacturing
平成26年9月1日から12日まで、生命体工学研究科内で、他大学・高専インターンシップ生4名を含む9名で実施しました。

ガイダンス

ガイダンス

ガイダンス

担当に分かれて演習

担当に分かれて演習

担当に分かれて演習

台車制御

アーム制御

ディスカッション

アーム制御実験

人物認識実験

総合動作実験

総合動作実験

コンテストでの成果発表

コンテストでの成果発表

コンテストでの成果発表

コンテストでの成果発表

コンテスト・実演

コンテスト・実演

コンテスト・実演

コンテスト・実演

コンテスト・実演

コンテスト・実演

コンテスト・実演
ミニカー/ミニロボ製作総合実習/Minicar/minirobot manufacturing
平成26年9月1日から9月12日まで、九工大若松キャンパスにて、高専インターンシップ生4名を含む8名で実施しました。

ガイダンス

ガイダンス
通信実習

制御実習
制御演習の様子

電子回路作製

電子回路作製
ミニカー通信テスト

経路生成課題説明中
制御信号プログラミング中
ミニカー動作テスト

ミニカー動作テスト

走行中のミニカー
コンテストの様子

コンテスト中

コンテスト中

コンテスト中

コンテスト中

コンテストでの成果発表
コンテストでの成果発表
コンテストでの成果発表
2実習成果報告会(2014/09/12)
@ホームロボット製作総合実習、ミニカー/ミニロボ製作総合実習の2実習が2014年9月12日に終了し、成果報告会を九州工業大学生命体研究科棟1階ロビーで行いました。2実習のそれぞれでコンテストを行い、最優秀賞などを決定し表彰しました。

成果報告会の様子

@ホーム実習表彰式

@ホーム実習表彰式
成果報告会の様子

成果報告会の様子
ミニカー実習表彰式

ミニカー実習表彰式

受講生集合写真

集合写真
認識プログラミング総合実習/Recognition programming
平成26年8月21日から9月16日まで、九工大飯塚キャンパスにて、履修生6名で実施しました。

演習中

ディスカッション

演習中

演習中

路上実験

講義の様子

コンテストでの成果発表

コンテストでの成果発表

コンテストでの成果発表

車載実験

車載実験
認識実習表彰式
各総合実習 表彰者
種別
総合実習【英語で実施 主に海外インターンシップ対応】
(2025年度は決定次第連絡します.以下は過去の内容です)
開講期
2022年12月~2023年1月頃
(5日間、3コマ/日、15コマ相当)
講師
九州工業大学・我妻教授
内容
安全・安心を見据えた将来の自動車の知能化において,ドライバ状態の推定と自動運転技術の先端融合技術に多大な関心が集まっている.本実習では,人の脳活動の状態に応じてロボットが反応し,動作するブレイン・マシン・インターフェース(BMI)の基盤技術として,脳波計測の基礎から,ミドルウェアロボット・オペレーティングシステム(ROS)を仲介したロボット制御の基礎技術までを習得する.ことに,カーロボ連携大学院のエッセンスを,海外修学に意欲のある優秀なアジア圏の学部生に提供し,最先端ハードウェア・ソフトウェア技術に触れさせ,最新科学技術の一端に触れ,問題解決の面白さと難しさを体感することで,将来日本において当該研究分野で貢献する人材の育成を行う.
■場所: 九工大(若松キャンパス),座学,実習:研究室(7550室)他
■人数・班構成: 5-10名 学部生予定.1班(5名以内の場合),2班(5名を超える場合).
■使用機材:3Dプリンタ2台,ヒト型ロボット1台,脳波計測機器等,デスクトップPC(5),ノートPC(2):計7台
■実習課題・必要要件:
1)ロボット機構設計・MBD講習
ロボット機構設計・ダイナミクス解析に必要なマルチボディダイナミクスを学び,ロボット機構の数理解析やシミュレーションができるようにする.
2)CAD製作実習
CADを用いたロボット用パーツの設計(一部)および3Dプリンタによる製作を行う.MBD解析と設計したパーツの可動性を比較し,ロボットに組み込む場合の問題解決などに取り組む.
3)ROSプログラミング・ヒト型ロボット制御実習
小型ヒト型ロボットを題材に,ROSモジュール開発を通して,ロボットの知能化に必要な多機能実装の技術を学び,生体信号によるロボット制御への活用のアイディアを考えて,プログラミングを行う.
4)信号解析実習
スパースモデリングなど最新の人工知能技術に触れ,脳波と筋電位などの信号分離の技術を学ぶ.
5)脳波計測実習
単純な動作時に発生する顕著な脳波活動を題材に,脳波計測体験を行い,脳活動を適切に信号処理して,ロボットへの動作タイミング指示を送信する回路を製作する.
5)総合課題・発表
BMIとしてどのような課題設定を行うか討議し,実習期間内に完了する実験系を完成させ,実演を行う.その際,役割分担や,工夫など各自行い,最終発表に備える.
■レポート:実習終了後1週間以内に,各人の担当分をレポートに作成して提出.
実習計画
【全員】
1. 実習概要・脳型知能創発講習(1コマ)
【ロボット制御班】
2. ロボット機構設計・MBD講習(2コマ)
3. CAD製作実習(3コマ)
4. ROSプログラミング講習(1コマ)
5. ヒト型ロボット制御実習(3コマ)
【脳波計測班】
2. 脳の仕組み・脳波計測基礎講習(2コマ)
3. 信号解析実習(3コマ)
4. 脳波計測・機器取り扱い講習(1コマ)
5. 脳波計測実習(3コマ)
【全員】
6. 総合課題への取り組み(4コマ)
7. コンテストないし発表(1コマ)
実習概要
人型ロボット制御と脳波計測
NAOの行動設計