コース紹介
種別
総合実習(1単位)
併設: デバイス試作実習ライトコース(単位なし)
開講期
30時間(1単位)
【1班】 講義2025/8/18(月),実習8/19(火)~8/25(月):計6日間 8/22(金):計5日間
【2班】 講義2025/8/18(月),実習8/25(月)~8/29(金):計6日間
デバイス試作実習ライトコース(単位なし)
2025/9/5(金)9:30-16:30(飯塚:送迎バスあり)
講師
〇講座:日本テキサス・インスツルメンツ・大川博氏
〇実習:FAIS・共同研究開発センター技術員
内容
共同研究開発センターのクリーンルームの設備を用いて、ダイオードの試作・評価を行う。また、半導体の基礎知識とビジネスの基本となるマーケティングを理解するための講座を受講する。
■日程
※実習時間:9:00~16:1017:00(内70分休憩)
8/18 講座「半導体ビジネス概論」講座(公開講座)
・半導体の基礎知識
・半導体とエレクトロニクス機器の関係性
・半導体の種類と製品市場の特徴およびサプライヤー
※講義の聴講のみの学生の受け入れも可(この場合の単位はなし)
8/19午後 実習 フォトマスクの作成,電極形成マスクのパターンファイル作成(L-Edit)実習
8/20 描画装置への入力,マスクブランクスのフォトリソ・エッチング実習
8/21 ダイオードの作成,絶縁層成膜とコンタクトホール形成のフォトリソ・エッチング実習
8/22 Al電極膜成膜,配線パターン形成のフォトリソ・エッチング実習,
電気特性測定と実習のまとめ
8/25午前 電気特性測定と実習のまとめ
■場所
〇講座:産学連携センター2F研修室
〇実習:共同研究開発センター1F
■人数
最大6名
■レポート
実習終了後1週間以内に、各自レポートを作成して提出
併設:デバイス試作実習ライトコース(単位なし)
内容
■日程
9/5 9:30~16:30
■場所
九州工業大学 マイクロ化総合技術センター(飯塚)
■内容
・Al配線形成工程実習
・分割・実装工程実習
・電気特性測定実習
■集合・解散の時間・場所
〇飯塚キャンパス在学生以外
・集合時間: 8:00
・解散予定時間: 18:00
・場所: 産学連携センター玄関前または折尾駅前(バスで移動)
〇飯塚キャンパス在学生
・集合時間: 9:15
・解散予定時間: 16:40
・場所: マイクロ化総合技術センター
■人数
16名
■レポート
集合場所・時間
初日集合時間: 2025/8/18(月)8:55
・初日集合場所:産学連携センター2F研修室
・詳細は初日の講義で説明
種別
総合実習(2単位)
開講期
2025/9/1(月)~9/12(金)(土日除)
(10日間、4コマ/日、40コマ・60時間相当)
講師
九工大・石井教授、他
内容
■実習概要:
本実習はスマート農業用IoTデバイスやロボットの自動制御システムを開発するための基礎技術を習得する.基本的な半導体素子を用いてセンサデータを取得する電気回路の製作やモータ制御回路の製作,半導体の集積回路であるマイクロコンピュータ(マイコン)のしくみやプログラム開発手順,タブレット端末用のプログラム開発と画像処理について学ぶ.実習の前半部は農業用ハウス環境制御総合実習と共同で実施し, 後半はタブレット端末を用いた環境情報の取得,マイコンからのステアリングモータの制御について実習し,最終的にトラクターの自動運転システムを開発する.
■日程: 9月1日(月)~9月12日(金)
※授業時間:10:00~17:00(12:00~13:00は休憩)
9/1(月) : オリエンテーション (1コマ)
Arduinoマイコンを用いた基本プログラムの演習 (3コマ)
9/2(火) : 半導体素子を用いたセンサ回路設計演習 (4コマ)
9/3(水) : マイコンによるモータ制御,通信プログラムの演習 (4コマ)
9/4(木) : Unityを用いたタブレット端末用プログラム入門,GUI作成 (4コマ)
9/5(金) : タブレット端末のセンサ情報取得プログラム演習 (4コマ)
9/8(月) : タブレット端末用の通信プログラム演習 (4コマ)
9/9(火) : 自己位置推定,障害物回避プログラム演習 (4コマ)
9/10(水) : トラクターの自動運転システムの開発 (4コマ)
9/11(木) :トラクターの自動運転システムの開発 (4コマ)
9/12(金) : 成果発表会 (4コマ)
■講師およびTA:
教員 :石井和男, 片山大悟,西田祐也,安川真輔
TA :佐藤光(D1),升田翔雲(M2),楢村健太(M2),三浦淳平(M1)
■場所:
1F MACS(前半の演習),HIBIKINO ODORIVA, 学研都市内の敷地(後半の演習)
■人数・班構成:
参加者16名以内,コンテスト4〜5班構成
■機材:
トラクター1台, ステアリング・速度制御装置1式,WiFi接続機器, ノートパソコン, デスクトップPC4〜5台, iPad Pro 等
■実習内容:
本実習は, 農業用トラクターの自動運転を題材として実習を行う. 3日目までは農業用ハウス環境制御総合実習と合同で講習を行い, 4日目以降はタブレット端末のアプリケーションの開発, ならびにトラクターの自動運転システムの構築に必要な技術要素について講習を行う. 2週目にはグループに分かれてトラクターの自動運転システムの開発を行い, 最終日その成果を発表する.
1)メカトロニクス演習:
メカトロニクス実習では,基本的な半導体素子であるダイオードやトランジスタ,オペアンプを用いたフィルタ回路や増幅回路,集積回路であるマイコンのしくみについて学ぶ.前半ではマイコンプログラミングでは,Arduino互換マイコンを対象に,農業用IoTセンサモジュールからのデータ取得方法,センサ周辺回路の設計,デジタルI/O,A/D変換,PWM出力などArduinoの基本的なAPIの使い方やLED制御回路など基本機能を学ぶ.後半では,nチェンネルエンハンスメント型FETを用いたDCモータドライバー回路を作成,モータ制御方法を学ぶ.モータ回転数を計測するノイズフィルタと増幅回路を設計し,フィードバック制御について学ぶ.
2)タブレット端末を用いた自動運転用アプリケーションの構築演習:
タブレット端末を対象としたプログラミングを学ぶ.タブレット端末に搭載されているセンサ情報を取得し, センサ情報の可視化, ならびにトラクターの状態を表示するGUIを備えたアプリケーションを開発する. 前半はアプリケーションの開発環境であるUnityと開発言語であるC#について学ぶ. 後半はLiDARセンサ, 加速度センサ, ジャイロセンサ, GPSなどの情報の取得について学ぶ, また, 自動運転ユニットに搭載されたArduino互換マイコンであるM5Stackとの通信方法についても学ぶ.
3)トラクターの自動運転システムの構築および成果発表会
複数のグループに分かれトラクターの自動運転システムを開発する.始めに, トラクターの自動運転に必要なロボットの運動学,移動軌道シミュレーションを学び,ステアリング制御, 軌道計画と連携するプログラムを作成する.1)2)で学んだ技術を活用し,トラクターの自動運転を目標に, タブレット端末用アプリケーションとアクチュエータ制御を行うマイコンプログラムとのシステム統合を行う. 最終日には, 開発したシステムのプレゼンテーション, ウェイポイントの追従,障害物回避のデモンストレーションを行い,学んだ成果を発表する.
■レポート:実習終了後1週間以内に、各人の担当分をレポートに作成して提出。
集合時間・場所
・初日集合時間: 2025/9/1 13:00 (ただし,インターンシップ生は午前中集合.別途連絡)
・初日集合場所: 生命体工学研究科 1F ロビー
・持参物:筆記用具など
・コンテスト時間: 2025/9/12(時間は別途連絡)
・コンテスト場所: 別途連絡
・他総合実習コンテスト見学:別途連絡
種別
総合実習(2単位)
開講期
2025/8/18(月)~8/29(金)(土日除)
(10日間、4コマ/日、40コマ・60時間相当)
講師
北九州市立大学・岡田教授、仲尾准教授、宮國准教授、池田准教授、他技術職員
内容
■日程:8月18日~8月29日(土日除)
初日(8/18):オリエンテーション・移動ロボットの基礎と製作
第1週(8/19 ~ 8/22):空力設計・流体シミュレーション演習
第2週(8/25 ~ 8/28):AI・メカトロニクス・ロボット制御
最終日(8/29):成果発表
■場所: 北九大ひびきのキャンパスN棟2F(物理実験スペース)、及び、加工センター2F(PC室)
■人数・班構成: 参加者9名、コンテスト3班構成(1班あたり3名構成)
■機材: 外装設計・流体シミュレーション用PC:参加学生人数分、3Dプリンタ:3台、移動ロボット (NVIDIA JetBot):3台、PC:参加学生人数分
■実習課題・必要要件・指導者:
本演習では、AI(機械学習)によってカメラ画像中から移動目標を検出し、強風の環境下でも走行できるロボットの設計・製作を行う。そのために以下の内容を行う。1) 複数の似たような形状の物体をAIによって識別する実習を行う。2) 複数の物体の中から指定された物体を移動目標として移動機構を制御するプログラムを作成する。3) 強風の影響を受けにくいボディを設計・製作するための基礎を学び、流体シミュレーションを行う。これらによって、AIを応用した画像認識技術,画像情報を用いた移動機構の制御方法および空力設計の基礎について学び、また機械系でのモノづくりに触れる。
1)AI・メカトロニクス・空力設計・計測演習:
・AI技術を用いた画像処理手法やコンピュータによるモータ制御について学び、移動ロボットの組み立てを行う。(岡田、池田、TA)
・空力設計の基礎を学び、その計算演習を行う。(仲尾、宮國、EA、TA)
2)AIプログラミング・ロボット制御:
・移動ロボットがAI技術を用いてカメラ画像中の複数の物体の中から指定された目標を識別するプログラミング実習を行う。(池田、TA)
・目標へ向かって移動する課題を設定し、実際の制御プログラムの製作演習を行う。その際には、障害物環境による隠れやロボット姿勢変化などの様々な悪影響に対処できることを目指す。必要に応じて、移動機構の改良も行う。(岡田、EA、TA)
・各種形状に対する強風の影響を推定するための流体シミュレーションを行い、車体設計に取り入れるための方策について検討する。(仲尾、宮國、EA、TA)
3)成果発表
プログラミングと外装検討を行った移動ロボットを用いて、成果発表を行う。プレゼンテーションによる各班ロボット動作についての解説及び実機披露として、目標位置到達タイムアタック等を通して、受講者の達成度を確認する。(岡田、仲尾、宮國、池田、EA、TA)
■レポート: 実習終了後1週間以内に、各人の担当分をレポートに作成して提出。
■事前学習:機械学習やPythonについて知識のない学生は、以下のweb pageなどを活用して学習しておくこと。
https://www.ai-gakkai.or.jp/whatsai/
https://ruby-de-free.net/wp/category/python-ai-introductory-course/
https://python.atelierkobato.com/kikai/
実習計画

AIミニロボット製作総合実習スケジュール
集合場所・時間
・初日集合時間: 2025/8/18 13:00 (ただし,インターンシップ生は午前中集合.別途連絡)
・初日集合場所: 北九大ひびきのキャンパスN棟2F(物理実験スペース)
・持参物 : 筆記用具など
・コンテスト日時: 2025/8/29(時間は別途連絡)
・コンテスト場所: 北九大ひびきのキャンパスN棟2F(物理実験スペース)
・他総合実習コンテスト見学:(時間は別途連絡)
種別
総合実習(2単位)
開講期
2025/9/1(月)~9/12(金)(土日除)
(10日間、4コマ/日、40コマ・60時間相当)
講師
九州工業大学・西田准教授、安川准教授、石井教授、片山助教,TA 5名
内容
■実習概要:
本実習はスマート農業用デバイスやロボットを開発するための基礎技術の習得を目的に,ワンボードマイコンの一種であるArduino(Arduino互換のボード)と電子部品から構成されるデバイスを作成し,周辺ハードウェアを制御する組み込みプログラミング技術を学ぶ.教材としてスマート農業をはじめとしたIoT関係の研究で注目を集めているM5Stack社が提供するArduino互換のワンボードマイコンを使用し,ハウス内の土壌水分量や室温などのデータ取得や,画像処理を用いた果実等の認識方法,LoRawWAN装置を用いたクラウドデータベースへのアップロードする方法について演習を行う.実習後半は,前半で学んだ技術を活かし実際のハウスで使用できるスマート農業のためのIoTデバイスの開発に取り組む.
■日程: 9月1日(月)~9月12日(金)
※授業時間:10:00~17:00(12:00~13:00はお昼休憩)
9/01(月) :オリエンテーション (1コマ)
Arduinoを用いた基本プログラムの演習 (3コマ)
9/02(火) :半導体素子を用いたセンサ回設計演習 (4コマ)
9/03(水) :マイコンによるモータ制御,通信プログラムの演習 (4コマ)
9/04(木) :Arduinoを使ったネットワーク通信に関する演習 (4コマ)
9/05(金) :Arduinoを使った画像処理演習 (4コマ)
9/08(月) :スマート農業のためのIoTデバイスの開発 (4コマ)
9/09(火) :スマート農業のためのIoTデバイスの開発 (4コマ)
9/10(水) :スマート農業のためのIoTデバイスの開発 (4コマ)
9/11(木) :スマート農業のためのIoTデバイスの開発 (4コマ)
9/12(金) :成果発表会 (4コマ)
■講師およびTA:
教員 :石井和男,安川真輔,西田祐也
TA :野口和宏(D3),宮川亮(D2),大西凌平(M2),吉田雄亮(M2),山上赳史(M1),渡邉拓真(M1)
■場所:
1F MAX(前半の授業),学研都市内 農業実習用ハウス(後半の演習)
■人数・班構成:
参加者:8名程度,コンテスト2~3班に分かれる
■機材:
ノートパソコン,演習用マイコン一式,LoRaWAN接続機器
1)Arduinoを使った基本プログラムの演習
組み込みマイコンの一つであるArduinoの基本的な使い方ついて学ぶため,本演習ではArduinoを使った簡単な回路を構成し,その回路に関するプログラムを制作する演習を行う.演習おいて,学生はデジタルI/Oピンを使ったLED点灯,PWMによるLED調光,センサからの値を取得するためのA/D変換およびUART通信,サーボモータの制御について学ぶ.授業の最後に応用課題として,I/OとUART通信およびサーボモータ制御を組み合わせた課題に取り組んでもらう.
2)半導体素子を用いたセンサ回設計演習
代表的な半導体素子の一つであるOPアンプを用いた増幅,演算回路の設計方法に関する演習を行う.本演習ではOPアンプの特徴や機能について説明した後,OPアンプを用いたボルテージフォロワ,非反転増幅,反転増幅,加算増幅などの回路について学び,各回路の出力を計算で求める.その後,実際にOPアンプを用いた回路を設計,製作し,その出力をデジタルオシロスコープで読み取り,回路の特性について調べる.
3)マイコンによるモータ制御,通信プログラムの演習
今後最も使用するUART通信の習熟を目的に,演習の最初にUARTのデータ送信関数およびアスキーコードをもとにしたデータ転送方法について演習を行う.その後,学生にマイコンを使ったブラシ付きDCモータの制御手法を学んでもらうため, FETを用いたモータドライバ回路を製作し,PWMによるモータ駆動およびPID制御を構築する演習を行う.演習では回路上にある素子の機能や役割,基本的なフィードバック制御について講義を行った後,Arduinoにタコメーターの値を取得しDCモータを駆動させるプログラムを作る.授業の最後に応用課題として,UART通信経由でモータの制御を変更できるプログラムの開発に取り組む.
4)Arduinoを使ったネットワーク通信に関する演習
本演習ではネットワークの基本構成や無線LANの種類,プロトコルなどネットワークに関する基礎知識に関する講義を行い,マイコン同士の送受信およびLoRaWAN通信に関する演習に取り組む.また,マイコンに各種センサを接続し,土壌水分量や照度,CO2,気圧,温度を計測し,その情報をマイコン間通信やLoRaWAN通信で送信する方法について万部.授業の応用課題として,取得したセンサ情報をESP-NOWおよびUART通信でPCに送信するプログラムの開発に取り組む.
5)Arduinoを使った画像処理演習
カメラでハウスにある農作物の認識をやるために必要な知識の習得を目的に,本演習では基礎的な画像処理手法について講義を行う.画像処理を行う機器としてM5 Stack社が提供するM5 CORE S3というArduinoと同じ環境で開発できるマイコンを用い,学生はRGBやHSV色相系を用いた白色や黒色,橙色などの物体を検出する手法や画像処理結果をM5 CORE S3に表示させる方法について学ぶ.また,M5 CORE S3にLLMモジュールを組み込み,LLMを使った画像処理方法についても学ぶ.
6)スマート農業のためのIoTデバイスの開発
本演習において学生は,複数のグループに分かれシステム構築実習を行う.各グループは,実習で学んだ技術を活用し,農業に役立つIoTシステムを開発し,その開発目的,コンセプト,機能,性能について発表する.学生は教師が提供した窓開閉モジュールおよび散水モジュールを使用でき,IoTモジュールを使ってハウス内の温度の制御や,畝の水分を制御可能である.グループの発表を聞いた教員は,有用性,完成度,操作性,発表の質,デモンストレーションの質によって評価する.
■レポート:実習終了後1週間以内に、各人の担当分をレポートに作成して提出。
■参考文献:
[1] SWITCH SCIENCE M5Stack LLM モジュールキット,2025.06.29取得
[2] X @kuma_XXP 投稿記事,2025.06.29取得

農業用ハウスの様子
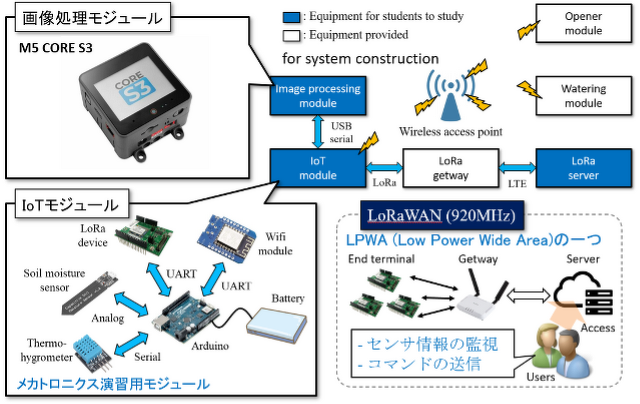
教材全体のシステム構

M5STACK社のLLM KIT[1]
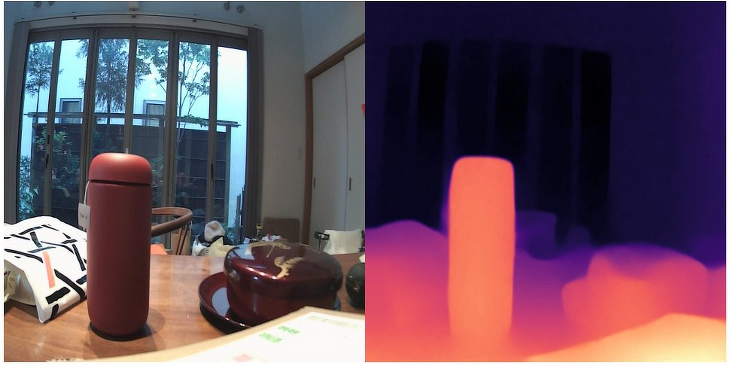
LLMで動作させたDepthAnythingの処理の結果[2]
集合場所・時間
・初日集合時間: 2025/9/1 13:00 (ただし,インターンシップ生は午前中集合.別途連絡)
・初日集合場所:生命体工学研究科 1F ロビー
・2日目以降実習時間:(別途連絡)
・コンテスト日時: 2025/9/12(時間は別途連絡)
・コンテスト場所: (別途連絡)
・他総合実習コンテスト見学:(時間は別途連絡)
総合実習コンテスト動画
総合実習 表彰者