BMI・ミニロボット設計総合実習(冬季開催)
種別
総合実習【英語で実施 主に海外インターンシップ対応】
(2024年度は決定次第連絡します.以下は2022年度の内容です)
開講期
2022年12月~2023年1月頃
(5日間、3コマ/日、15コマ相当)
講師
九州工業大学・我妻教授
内容
安全・安心を見据えた将来の自動車の知能化において,ドライバ状態の推定と自動運転技術の先端融合技術に多大な関心が集まっている.本実習では,人の脳活動の状態に応じてロボットが反応し,動作するブレイン・マシン・インターフェース(BMI)の基盤技術として,脳波計測の基礎から,ミドルウェアロボット・オペレーティングシステム(ROS)を仲介したロボット制御の基礎技術までを習得する.ことに,カーロボ連携大学院のエッセンスを,海外修学に意欲のある優秀なアジア圏の学部生に提供し,最先端ハードウェア・ソフトウェア技術に触れさせ,最新科学技術の一端に触れ,問題解決の面白さと難しさを体感することで,将来日本において当該研究分野で貢献する人材の育成を行う.
■場所: 九工大(若松キャンパス),座学,実習:研究室(7550室)他
■人数・班構成: 5-10名 学部生予定.1班(5名以内の場合),2班(5名を超える場合).
■使用機材:3Dプリンタ2台,ヒト型ロボット1台,脳波計測機器等,デスクトップPC(5),ノートPC(2):計7台
■実習課題・必要要件:
1)ロボット機構設計・MBD講習
ロボット機構設計・ダイナミクス解析に必要なマルチボディダイナミクスを学び,ロボット機構の数理解析やシミュレーションができるようにする.
2)CAD製作実習
CADを用いたロボット用パーツの設計(一部)および3Dプリンタによる製作を行う.MBD解析と設計したパーツの可動性を比較し,ロボットに組み込む場合の問題解決などに取り組む.
3)ROSプログラミング・ヒト型ロボット制御実習
小型ヒト型ロボットを題材に,ROSモジュール開発を通して,ロボットの知能化に必要な多機能実装の技術を学び,生体信号によるロボット制御への活用のアイディアを考えて,プログラミングを行う.
4)信号解析実習
スパースモデリングなど最新の人工知能技術に触れ,脳波と筋電位などの信号分離の技術を学ぶ.
5)脳波計測実習
単純な動作時に発生する顕著な脳波活動を題材に,脳波計測体験を行い,脳活動を適切に信号処理して,ロボットへの動作タイミング指示を送信する回路を製作する.
5)総合課題・発表
BMIとしてどのような課題設定を行うか討議し,実習期間内に完了する実験系を完成させ,実演を行う.その際,役割分担や,工夫など各自行い,最終発表に備える.
■レポート:実習終了後1週間以内に,各人の担当分をレポートに作成して提出.
実習計画
【全員】
1. 実習概要・脳型知能創発講習(1コマ)
【ロボット制御班】
2. ロボット機構設計・MBD講習(2コマ)
3. CAD製作実習(3コマ)
4. ROSプログラミング講習(1コマ)
5. ヒト型ロボット制御実習(3コマ)
【脳波計測班】
2. 脳の仕組み・脳波計測基礎講習(2コマ)
3. 信号解析実習(3コマ)
4. 脳波計測・機器取り扱い講習(1コマ)
5. 脳波計測実習(3コマ)
【全員】
6. 総合課題への取り組み(4コマ)
7. コンテストないし発表(1コマ)
実習概要
人型ロボット制御と脳波計測
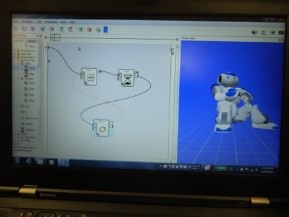
NAOの行動設計